
トラブルシューティング (FAQ)BETAFPV - ドローン総合事業|販売|DJI|INSTA360|CHASING|FRSKY|BETAFPV日本正規代理 AIRSTAGE (エアステージ)
カテゴリー
-






 DJI 産業用 ドローン (測量・空撮)
DJI 産業用 ドローン (測量・空撮)
- 産業用【本体】
- 産業用【部品】
- DJI Matrice 4シリーズ 部品
- DJI Dock 3(Matrice 4D)部品
- DJI Dock 2 部品
- FlyCart 100 部品
- FlyCart 30 部品
- DJI Mavic 3 Enterpriseシリーズ 部品
- Matrice 30シリーズ 部品
- Matrice 400 部品
- Matrice 300 RTK 部品
- Matrice 350 RTK 部品
- Matrice 200 シリーズ 部品
- Matrice 600 部品
- Matrice 600PRO 部品
- Mavic 2 Enterprise Advanced 部品
- DJI Mavic 2 Enterprise 部品
- S1000Plemium 部品
- 産業用【カメラ・ジンバル】
- 産業用【SPオプション】(CZI)
- その他 アクセサリー
 DJI 農業用 ドローン(農薬散布)
DJI 農業用 ドローン(農薬散布)
 DJI RoboMaster
DJI RoboMaster















- - ツール・アクセサリー他
- - バイク用品・教習
- - ミニセグウェイ
- - 書籍(Books)
- - ラッピング資材
- - 事務用品
- - 期間限定商品
- - 予約販売品
- ◆ AIRSTAGEメンバーズ商品
- D
ベストセラー
-
01
- 今日から30日間の集計
- 新着情報ページ
WEB通販営業日
-
2026年6月 日 月 火 水 木 金 土 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30




 (一般通販禁止品・AIRSTAGEグループ窓口にて)◆DJI農業◆【注文後生産状況確認し請求書送付】")
(T70P)(一般通販禁止品・AIRSTAGEグループ窓口にて)◆DJI農業◆【注文後生産状況確認し請求書送付】")
【注文後生産状況確認し請求書送付】")



 — YC.SJ.GG000060.05 【オレンジライン入りまたはブラック 色指定不可】(T20互換)【注文後生産状況確認し請求書送付】")
 — YC.SJ.GG000061.05 【オレンジライン入りまたはブラック 色指定不可】(T20互換)【注文後生産状況確認し請求書送付】")
【注文後生産状況確認し請求書送付】 6941565975317(旧番号20252)")
![]()




トラブルシューティング (FAQ)BETAFPV
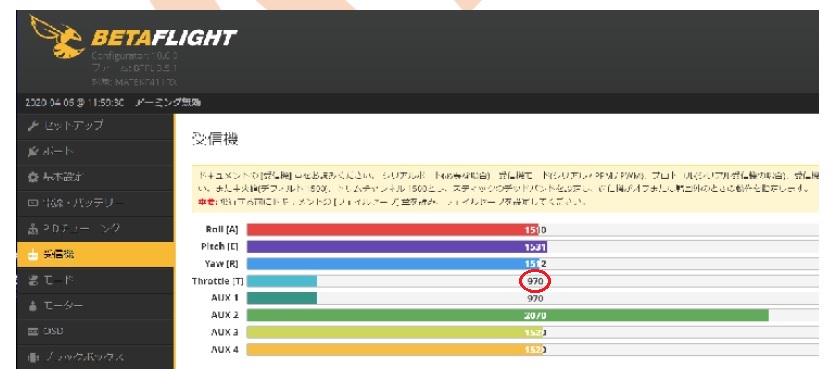
Q1:BETAFPV65sについて、付属のマニュアルに沿って設定を行いましたが、アームスイッチをONにしてスロットルを上げてもモーターが回りません
A:送信機側の設定操作にて、スロットルのエンドポイントを、970程度(999以下)~2000程度に調整してください。(付属マニュアルP6の画像参照)
※betaflightソフト側の設定ではなく、送信機側で調整してください(PC画面を確認しながらおこなってください)
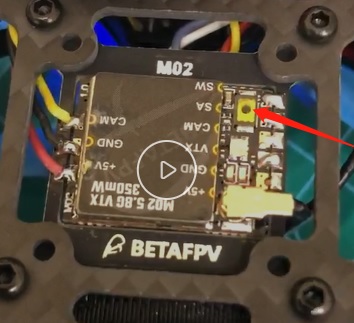
Q2:BETAFPV 85X V2について、機体とゴーグルの距離が離れると、映像が途切れてしまいます
A:VTX基盤のLEDが緑点滅の場合、下記画像の赤矢印が示すボタンの2回押しをおこない、LEDが赤または赤青点滅状態にしてご確認ください
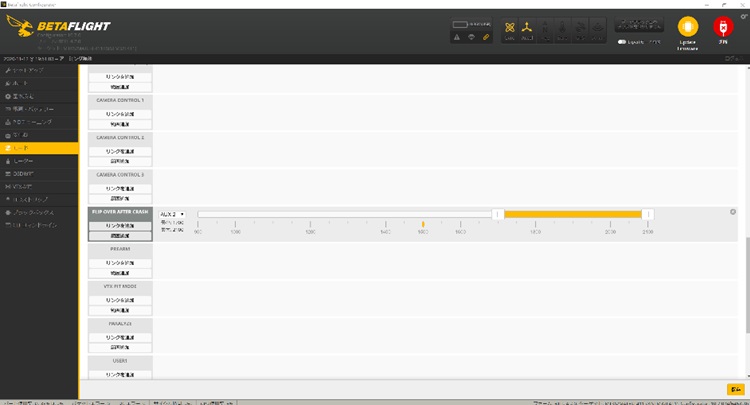
Q3:BETAFPVの機体を使用していて、アーミングは出来ていますが、スロットル操作をしてもモーターが回転しません。
しかし、エレベーターやエルロン、ラダー操作は反応があり、その場でそれぞれの操作に合ったモーター2つが回転します。対処法はありますか。
A:「FLIP OVER AFTER CRASH」(タートルモード)に入っていないか確認してみてください。
実際に「FLIP OVER AFTER CRASH」を割り当てていた場合は、割り当てを削除するか、割り当てたスイッチを切り替えて動作するか確認してみてください。
割り当てられているかどうかについてはBETAFLIGHTにて以下の手順で確認してください。
1. 機体を「BETAFLIGHT」と接続する。
2. 左のメニューより、「モード」を選択して、モードの割り当て画面を表示させ、下の方にスクロールすることで「FLIP OVER AFTER CRASH」の
割り当てや範囲について確認できます
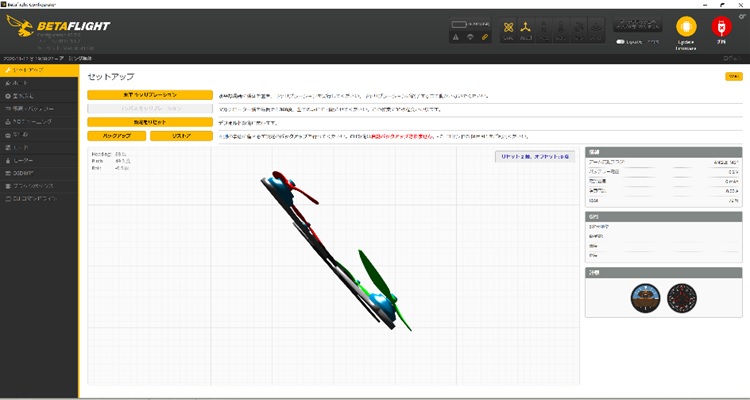
Q4:BETAFPVの機体を使用しています。離陸後、機体が斜め上方向に上昇するなど、安定感が無いように感じます。改善する方法はありますか?
A:機体の水平キャリブレーションをお試しください。以下、手順です。
①機体を「BETAFLIGHT」と接続し、水平状態で静止させる
②「セットアップ」内の「水平キャリブレーション」を実施する(下記画像参照)

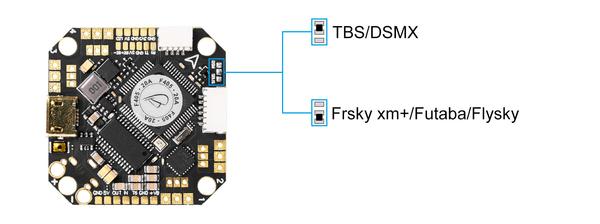
Q5:LiteRadio 2 のプロポを使用していますが、FrskyやFutabaの受信機とバインドさせる際の切り替え方法を教えてください
A:FrskyやFutaba等ご使用の受信機に合うプロトコルへの切り替えが必要です。
プロトコルの切り替え方法につきましては、以下の通りです。
①最初に電源をオフにする。
②バインドボタンを押したままにして、電源を入れる。
上記の手順でプロトコルを切り替えることが出来ます。
●現在のプロトコルの設定状況の確認方法
起動時のブザーアラームが鳴る前の赤いLEDの点滅時間が変化し、
どのプロトコルがオンになっているかが 示されす。
点滅時間とプロトコルの関係は以下の通りです。
・1回フラッシュ→Frsky FCC D16
・2回フラッシュ→Frsky LBT D16
・3回フラッシュ→Frsky D8
・4回フラッシュ→FUTABA S-FHSS
Q6:BETAFPV Beta95X V3について、FC基板を交換したのですが、機体が動きません。
受信機LEDの反応からプロポとのバインドはされているように思いますが、
BETAFLIGHT上ではスティックの反応がない状態です。
A:以下についてご確認お願いします。
1、FC基盤と各配線の位置が正しいかご確認ください。
配線が誤っていた場合は正しい位置に付け直しをお願いします。
2、受信機を他の機体に接続し、プロポとバインドされるか確認お願いします。
※他の機体に接続しても反応しない場合は受信機側の問題の可能性がございます。
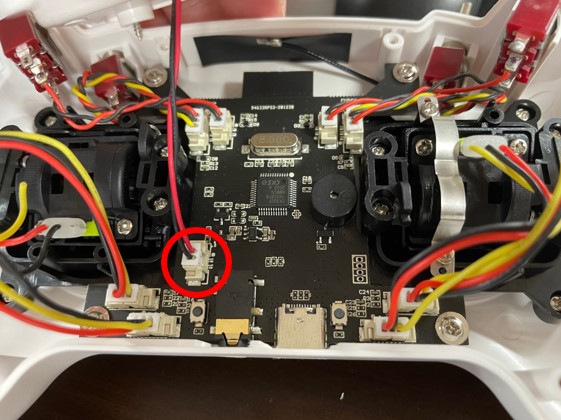
3、FC基盤上で以下の部分にハンダで繋げているか確認お願いします。
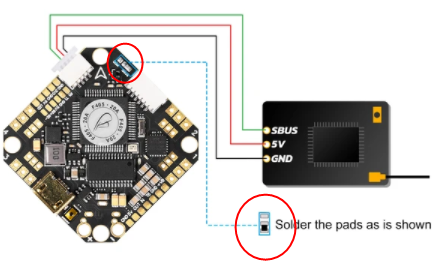
FC基盤の上記部分にハンダがされていない場合はFCへの受信の設定がされていない状態です。その場合上記画像に記載されております赤い丸の部分にハンダをする必要があります。
お使いのプロポに応じて、ハンダで繋げる箇所が異なります
●SBUS(フタバ、FRSKY)の場合
3つある銀色の部分に、「SV」と「SBUS」と書いてある場所がございます。
その2つを繋げるようにハンダをすることでFCと受信機がリンクできます。
使用プロポに応じたハンダ接続箇所は下記画像にてご確認ください。
Q7:Beta65SとCetusを使用しています。プロペラが1つ回っていないのですが、何か対処法はありますか?
A.まず初めに下記についてお試し頂き、ご確認いただけますでしょうか。
①、モーターをアイドリング状態(モーターを回転させているが飛び立っていない状態)にします。
※この時恐らく一つだけ回転していないモーターがある状態かと思います。
②、①のアイドリング状態の機体を手で持ち上げて、機体を前後左右に傾けた時、
回転していなかったモーターが回転するようになるか確認してください。
この時回転していなかったモーターが回転した場合は、
スロットルを上げることで、正常に飛行できる可能性がございます。
※機体を床に置き、スロットルを思い切って上げた場合に
回転していなかったモーターが正常に回転し、飛行する可能性があります。
※スロットルの上げすぎには十分ご注意下さい。
機体の特性として水平を感知するために飛行の際一度機体ごと傾き、
水平かどうか確認する挙動をとりますので、その際にアイドリング状態では
一部のモーターが回転していない状態になる可能性がございます。
上記を試して頂き、それでもモーターが回転しないようでしたら、
モーターに異常がある可能性がございますので、モーターを交換して頂くか、
販売店にご相談いただく必要があります。
Q8:Cetusを使用しています。飛行中に機体が前後左右に流れて行ってしまいます。何か対処法はありますか?
A:機体の中のIMUに誤差が生じ、水平の認識にズレが発生している可能性があります。
以下の手順にて、水平キャリブレーションを行い改善するかお試しください。
≪水平キャリブレーション方法≫
予め、ゴーグル・送信機・機体の接続を行います。
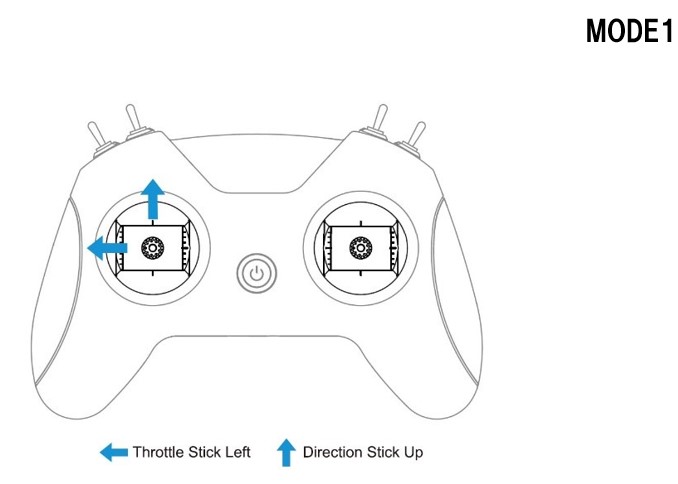
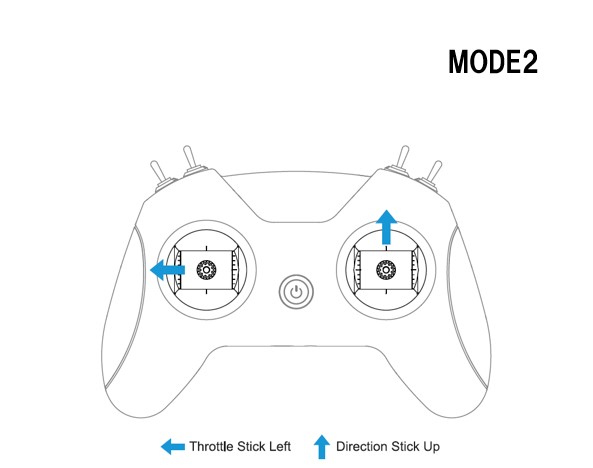
①画像のようにスティックを同時に倒す
モード1とモード2ではやり方が異なりますので、以下の画像をご確認いただき、それぞれのモードに合うようにスティックを倒してください。
②ゴーグルに画像2のように表示されますので、機体を水平面に置き、
「CONFIG」→「CALI」を選択しキャリブレーションを行います。
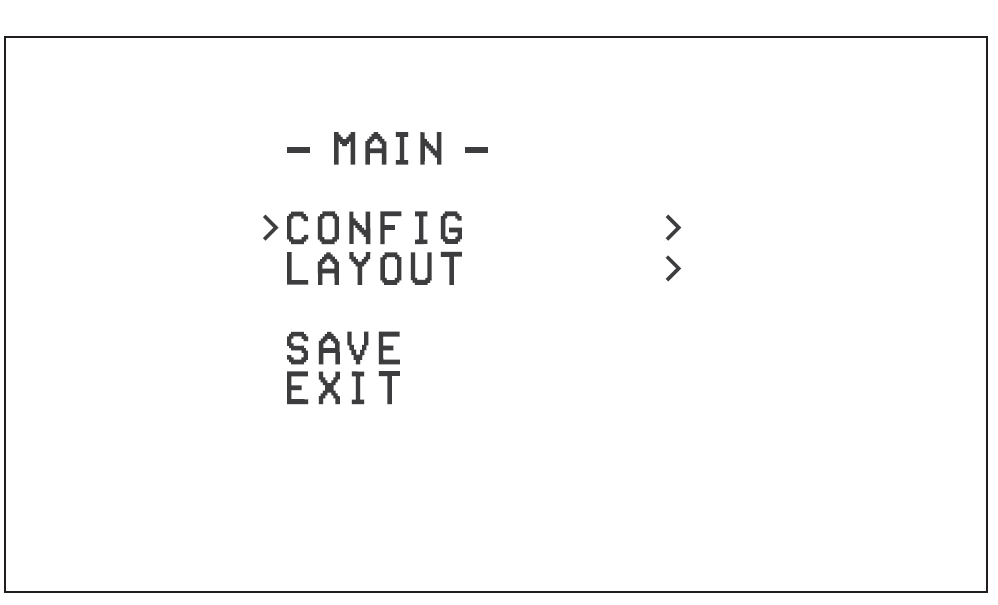
③完了後、「BACK」を選択し、「SAVE」を押して電源を入れなおします。
水平キャリブレーション後、最初は不安定な状態になる場合がございますが、しばらく飛行させていると安定するようになります。
※飛行時の姿勢を機体が確認するため、最初は不安定な状態になる場合がございます。
上記ご確認ください。
Q9:BETAFPV×Insta360 SMO 4K カメラの使用の為、Insta360 のアプリをダウンロードしました。しかし、スマホとの接続ができません。何か対処法はございますでしょうか
A:まずはスマホ内の設定にて、WifiとBluetoothの設定がONになっているかご確認ください。
OFFの場合はONに設定お願いします。
WifiとBluetoothの設定がONの場合でも接続できない場合、
Insta360アプリの内部設定の「アクセスを許可」がOFFになっている可能性があります。
Insta360アプリの「アクセスを許可」からBluetoothの設定をONにするため、
スマホの設定より下記の方法をお試しください。
①トップ画面の「設定」をタップします。
![]()
②下にスクロールすると「Insta360」のアプリが表示されているのでタップします。
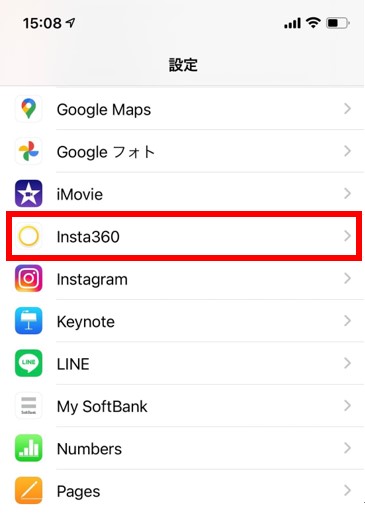
③すべてのアクセスを許可します。

④トップ画面に戻り、Insta360アプリを開き接続し直します。
使用しているスマホ端末によって設定方法が違う場合がございますのでご注意ください。
Q10:Cetusを使用しています。モード2からモード1への変更の方法が分かりません。
A.モード変更を行う場合、以下の2つの作業を行うことで変更することが出来ます。
Ⅰ、送信機内部のバネの入れ替え作業
Ⅱ、送信機のソフト面でのモード変更
それぞれのやり方につきましては下記ご参照ください。
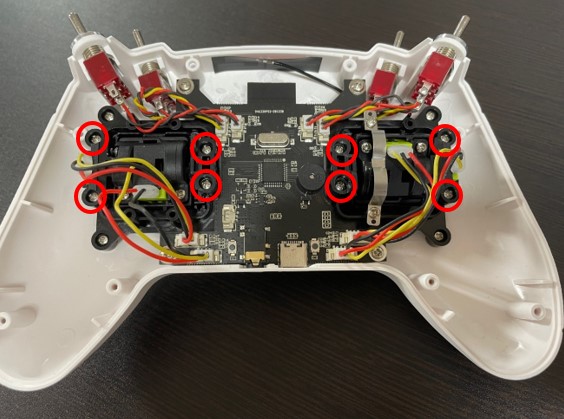
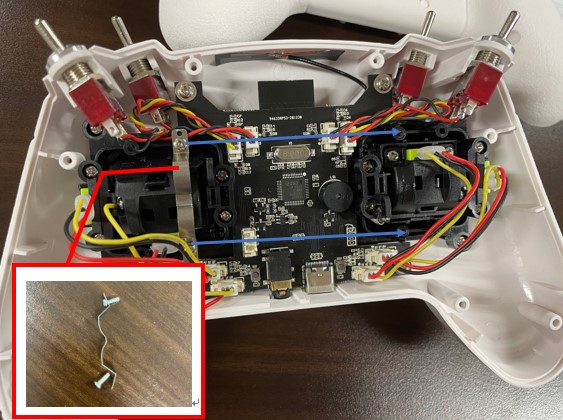
【Ⅰ、送信機のバネの入れ替え方法】
①送信機の裏面のネジを8ヵ所はずします。

②赤丸印のバッテリーのコネクターを抜きます。
③赤丸印のネジを8ヵ所はずします。
④送信機左側のスティック部分のネジを外すとバネが見えるので取り出します。
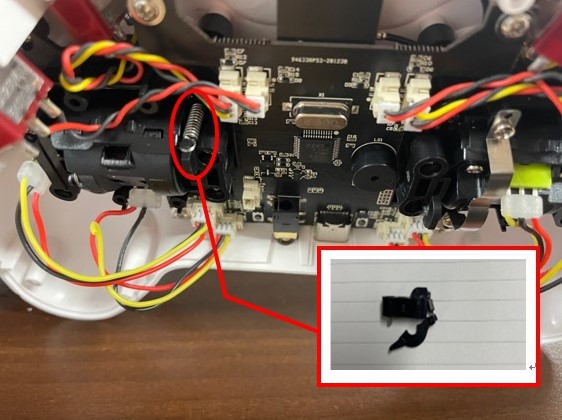
⑤反対側のスティック部分に取り付けます。
青丸印に爪のような、はめ込む部分がございますのでしっかりとはめ込んでください。
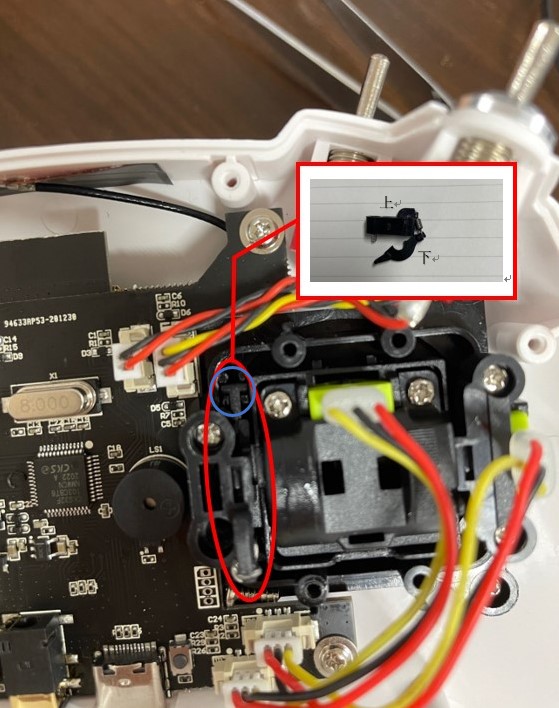
⑥赤枠の部品を取り出し、反対側にネジで取り付けます。
【Ⅱ、ソフト面の変更方法】
送信機のソフト面のモードを変更する場合は、PCに専用のアプリを入れて頂き、送信機とPCを接続して変更する必要がございます。
送信機のバージョンによって変更方法が異なります。
【LiteRadio_2_SE_Updataソフト対応Ver】
【BETAFPV Configuratorソフト対応Ver】
下記の表をご覧いただき、裏側カバー内の証明シールで見分けることができます。
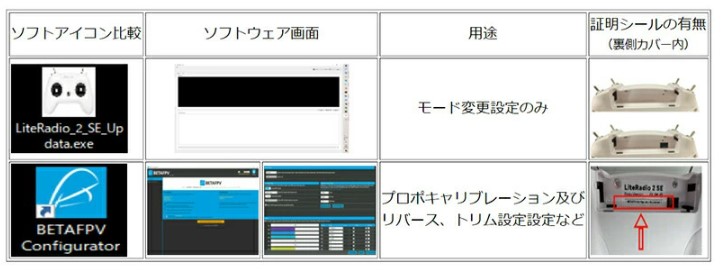
【LiteRadio_2_SE_Updataソフト対応Ver】の変更方法
【BETAFPV Configuratorソフト対応Ver】の変更方法
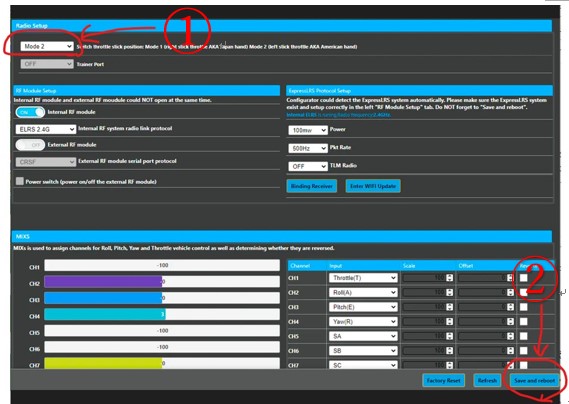
Ⅰ、下記のURLよりBETAFPVConfiguratorをダウンロードします。
https://github.com/BETAFPV/BETAFPV_Configurator/releases/tag/V1.1.1-RC1
Ⅱ、送信機をPCと接続して頂きBETAFPVConfiguratorを開きますと
下記画像①でモードの切り替えが可能です。
モードを切り替えましたら②を選択し、完了です。
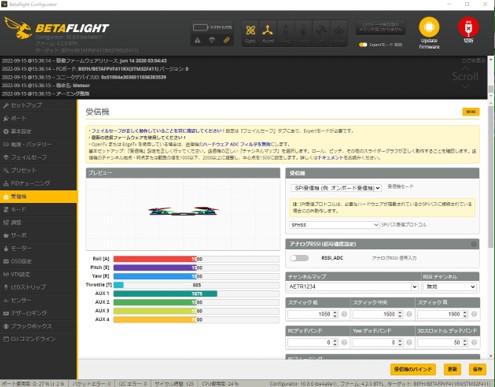
Q11:BETAFPV Beta95X V3について、AC900受信機とフタバ送信機のバインドが上手くいきません。何か方法はありますか?
A:受信機のモードがS-FHSSになっていない可能性があります。
まず、下記の方法でモードの確認を行ってください。
≪モードの確認方法≫
受信機の電源を入れます。
送信機のLEDが一番初めに光る色で判断します。
S-FHSS・・・赤色
FRSKYのnon-EU・・・緑色
FRSKYのEU-LBT・・・オレンジ色
※上記の確認方法で、LEDが赤色に光らない場合は
下記の方法でモード変更を行ってください。
≪モード変更の方法≫
受信機の電源を入れます。
赤か緑が点灯するので、その状況の時に受信機のボタンを3秒ほど長押しします。
受信機のLEDが黄色に点灯したらモード変更完了です。
モードが変更できましたら再度バインドを行ってください。
Q12:BETAFPV Meteor65に「Meteor65HD F4 1S AIOブラシレスフライトコントローラー【Frsky】」を接続したところ、
バインドはしましたが、離陸しませんでした。
何かそのほかに設定等は必要なのでしょうか。
※モーターは回転しますが、スロットを上げいっても離陸せず、進行方向に対し右に急旋回する状態です。
A:以下についてご確認ください。
① FLIP OVER AFTER CRASH モードの確認
Betaflightソフトに接続し、「モード」タブの中にFLIP OVER AFTER CRASHの設定が入っているか確認をお願い致します。
入っている場合はこちらのモードが原因で飛行しない可能性がありますので、
こちらのモードを変更して飛行できるかご確認ください。
※Qbe3参照
② モーターの回転方向の確認
FCを交換した場合、それぞれのモーターの回転方法が異なっている可能性がございます。
それぞれのモーターの実際の回転方向やBETAFLIGHT上での回転方向が異なっていないかなどご確認お願いします。
特にすべてのモーターが同一方向に回転している場合もあります。
その場合、モーター個別での回転方向の変更が必要になります。
個別の回転方向の変更は「BLHeli Configurator」という別のソフトで行うことができます。
●BLHeli Configurator
https://github.com/blheli-configurator/blheli-configurator/releases
上記を行っても改善しない場合はご購入店にお問い合わせ下さい。

Q13:Cetus proを使用しています。Lightradio2 SEとCetus proでバインドはするのですが、機体のLEDが白く点滅し続け、飛行できません。
A: Cetus proの白い点滅は「アームの失敗」を意味しております。
送信機のスロットルスティックを下げて再度アームスイッチをオンにしてください。
また、スティックを下に倒しても変化が無い場合は
送信機スティックのキャリブレーションを行っていただき、再度スロットルスティックを下げてアームスイッチをオンにしてください。

Q14:BETA FPV Meteor75 のバインドボタンが押しずらいです、他の方法は有りますか
A: はい、ございます
Betaflightに接続して頂いて、受信機タブを開いて頂きますと、右下に「受信機のバインド」ボタンがございます
こちらを押して頂きますとバインドボタンの代わりになります
Q15: Beta 65Sを使用しています。Betafrightを使ったプロトコルの変更方法がわかりません。
A:プロトコルの変更方法につきましては下記URLをご参照ください。
https://dji-airstage.com/news/2022/10/27/betafpvf4-brushed-flight-controller/

Q16:Meteor65にてARMが出来なく、バインドもしません
A: 機体自体の情報が消えてしまっている事があります
機体情報が消えてしまう要因としまして、私の聞いた話ですと衝撃や機体内部に熱を持った時、
バッテリーの抜き差し時やバッテリーを完全に使い切った時やPCに繋いだ際のノイズ等、要因は色々あるそうです
バッテリー交換の際に息を吹きかけて機体内部を換気して頂くなどをお願い致します
一度リストア作業をお試しください、事前にバックアップを作成している場合はそちらから、
メーカーのホームページにも初期設定のCLIデーターがございます
https://support.betafpv.com/hc/en-us/categories/900000230226-CLI-of-Quadcopters
下記の手順にてお願い致します
Betaflightに機体を接続しまして、左側タブの一番下CLIコマンドを開きます
添付致しましたリストアデーターのPDFファイルを開き全部をコピーして
Betaflight中央黒い画面の下にコマンド入力できる所に貼り付けて enter キーを押してください
止まるまで待ってそのまま切断まで行けば再接続してください
再度、バインド作業をお願い致します

Q17:Meteor75(2022V)のフライトコントローラーを交換しました。モーターが全部同じ方向に回転します、治りますでしょうか
A: はい、ESC-Configurator(URL:https://esc-configurator.com/)というWebアプリにてモーター1つずつの回転方向を変更できます
Q18:CetusシリーズやBeta65s、Meteor75などは
Frsky・FUTABAのプロトコルの変更が可能ですか。
A:機体プロトコルの変更はBeta fright Configuratorというソフトを通じて行うことができます。
Beta65sやMeteor75等の製品はBeta fright Configuratorというソフトが対応しており
こちらのソフトではプロトコルの変更が可能となっておりましたが
一方CetusシリーズではBeta FPV Configuratorという
ソフトにしか対応しておらず、プロトコルの変更が出来かねる仕様となっております。
(※Cetus X FRSKYバージョンを除く)
プロトコルの変更は、下記画像の「基本設定」タブまたは「セットアップ」タブに変更ボタンがございます。

Q19: Meteor65(Betafright Configratorのソフトを使用する機体)を使用しています。
送信機のARMスイッチを押しても機体がARMできない状態になっています。
どうすればARMできるようになりますか?
A:送信機と機体をバインドして頂きBetafright Configratorとお持ちの機体を接続していただき「セットアップ」項目の右上にある
「アーム無効フラグ」という項目に基本的なARMのできない理由が記載されています。
ジャイロが垂直を保っていない状態や、送信機のスロットルスティックが十分に下がっていない状態になっていると「アーム無効フラグ」に該当するエラーメッセージが表示されます。
※下記のスクリーンショットは、スロットルスティックが十分に下がっていない場合のエラー表示となっています。
エラーメッセージの内容をご確認いただき、問題のある部分を修正することでARMが行える場合があります。

Q20: Meteor65/75のELRSプロトコルバージョンのバインドのやり方を教えてください。
A:下記にて、Meteor65/75の基板のバインド手順を記載致しました。
動画と併せてご確認ください。
【バインド手順】
① 機体にバッテリーを一瞬接続する動作を5回ほど行います。
② 機体の緑色のランプが2回ずつ点滅していることを確認します。
(2回ずつランプが点滅している状態になりますと、基板がバインドモードに移行しています)
③ LiteRadio3送信機の電源ボタンを入れ、バインドボタンを押します。
④ 機体の緑色のランプが点灯しますと、バインド完了となります。
また、バインドモードに移行していない場合のランプの点滅は一回ずつ、間隔をあけて点滅しております。
動画では初めにバインドモードではない通常の点滅を示し、次にバインドモードとなっている場合の点滅を示しております。
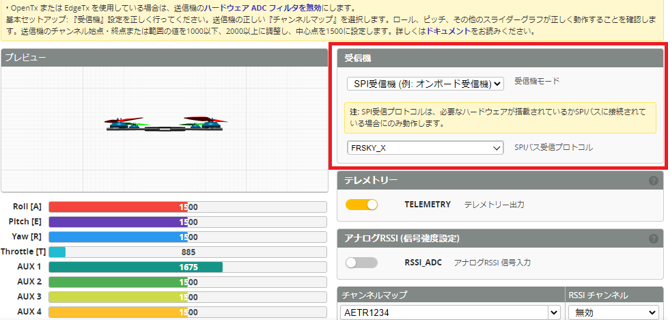
Q: Meteorシリーズにて、アーム無効フラグに「RPM Filter」と記載があり飛行することができません。
どうすればARMできるようになりますか。
A:現在の飛行制御 ESC ファームウェアが「双方向 Dshot 機能」をサポートしていないか
RPM Filterが正しく設定されていないことを示しております。
Beta Fright Configrator画面の「モーター」項目の、赤い枠で囲われたボタンを押していただき、右下の「保存」を押していただく事で双方向Dshot機能をリセットすることがで、アーム無効フラグに「RPM Filter」が消える事がございます。
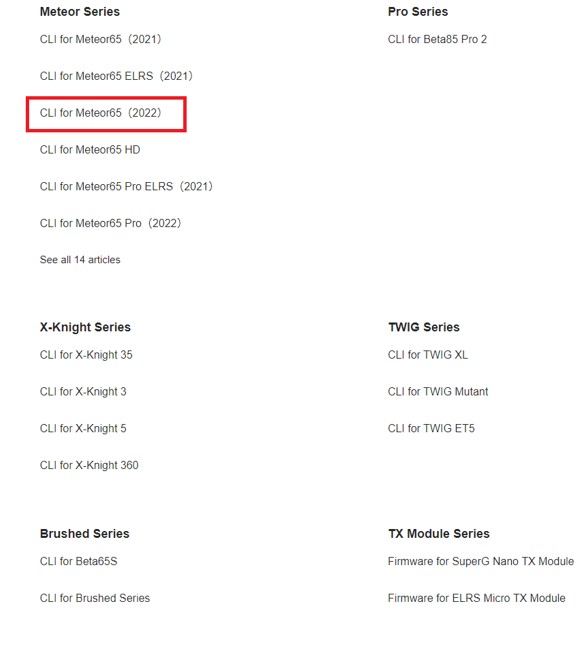
Q: Betafright Configratorの各機体のCLIデータの入れ方を教えてください(例:Meteor65 2022)
A:CLIデータとは、メーカーより提供されております機体のデータです。
Beta Fright Conrigratorより、書き込んでいただく事で、機体内部の設定をデフォルトに戻すことが可能となっております。
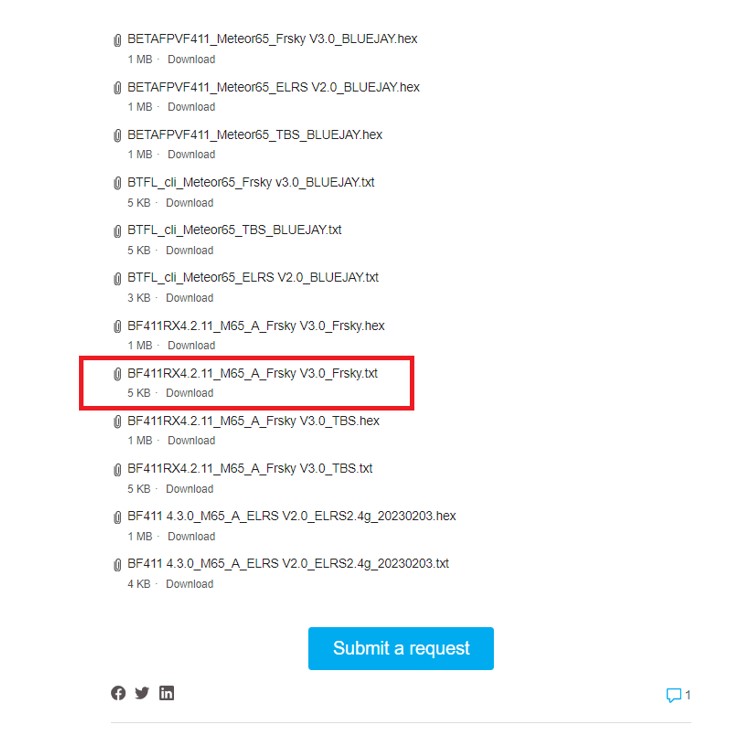
CLIデータにつきましては、下記URLの中からお持ちの機体をお選びいただき、ページの一番下にある該当プロトコルのtxtファイルをダウンロードしていただく事でCLIデータの取得が可能です。
https://support.betafpv.com/hc/en-us/categories/900000230226-CLI-of-Quadcopters
【CLIデータの入れ方】
Beta Fright Configrator内の「コマンドライン」項目にて、先ほどダウンロードしたテキストをペーストしEnterを押すと、CLIデータの書き込みが始まります
また、CLIデータを入れますと自動で本体が再接続されますが
もし再接続が行われない状況でしたら、さらに「save」と入力し
Enterを押していただきますと再接続が行われます。
※機体のデフォルトに戻すと、バインドの設定も切れてしまうため、再度設定をお願いいたします。
以上でCLIデータの書き込みが完了し、機体内部の設定をデフォルトに戻すことができます。
Q: Betafrightで現在の設定のバックアップ方法を教えてください
A: バックアップは、機体をBetafright configratorに接続した状態で
一番下のタブの「CLIコマンドリスト」を開き、文字入力欄に「Dump」と入力しEnterを押すと
機体の情報を表示している様子が画面に表示されます。
しばらくお待ちいただき、画面が止まったら下記画像の右下にございます「ファイルへ保存」を押し
ご自身のわかりやすい場所にデータを保管してください。
バックアップしたデータを呼び出す場合は、バックアップしていただいたテキストを全選択(Ctrl+A)、
CLIコマンドリストの文字入力欄にペースト(Ctrl+V)し
Enterを押すことでCLIデータのフラッシュが始まります。
![]()