|
Qw29:QR_SPACEWALKERで長いアームを抜いて4アームにしたが浮上しない。
A:まずダウンロードページでQR_SPACEWALKERのX4 programe をダウンロードします
https://www.rc-airstage.com/page_info.php/pages_id/13
オプションコードのUP02を利用してPC上でアップデートします。
次にモーター配線を繋ぎ直し、プロペラを付け直します。
右上のモーター
配線を基盤Eに接続します。この時白い基盤に付いているコネクターベースをペンチ等で抜き取り、モーターを左回りにするために
反対に接続します。上が赤下が黒い配線になるように接続します。
プロペラは左回り用の物を取り外した長いアームから付け替えます。
左上のモーター
配線を基盤Hに接続します。
プロペラはそのままです。
左下のモーター
配線を基盤Gに接続します。この時白い基盤に付いているコネクターベースをペンチ等で抜き取り、モーターを左回りにするために
反対に接続します。上が赤下が黒い配線になるように接続します。
プロペラは左回り用の物を取り外した長いアームから付け替えます。
右下のモーター
配線を基盤Fに接続します。
プロペラはそのままです。
Qw30:WALKERA QRのY6についてプロペラを交換したが離陸できない故障したのではないか。
A:どこかの利用プロペラが間違えています。
特に回転方向についてしたのプロペラの向きを見てください
向きを確認した後、揚力を得るためにあるアールが下を向いているものを利用されているかを確認してください
Qw31:DEVO8Sをアップデートの為TOOLやドライバー等をインストールしてdevention Upgrade Toolsを稼働させました。
DevoDfuSeを走らせると「DevoDfuseMFC Applicationは動作を停止しました」のウィンッドウが現れプログラムが走りません。
問題の詳細には
問題の署名:
問題イベント名:APPCRASH
アプリケーション名: DevoDfuSe.exe等の記載が現れます。なぜですか?
なお、WIN7とXPがそれぞれ入った合計2台のPCでテストしていますが同じ結果です。XPの方はほぼクリーンインストール状態です。
A:Windowsコミュニティーに、参考内容が記載されておりますのでご参照ください
https://answers.microsoft.com/ja-jp/Search/Search?SearchTerm=APPCRASH&CurrentScope.ForumName=&CurrentScope.Filter=&askingquestion=False
このエラーは、送信機やソフト上ではなく、何らかのWindowsエラーです。
2台とも利用できなかったのですが、共通する干渉要因があると思われます。解決の為には自作PC等であとからOSをインストールするPCではなく
メーカーパソコンで最初からOSが入っているノートパソコン等があればそれらでお試し下さい。
Qw32:4F200LMを飛ばしました。動作に何も異常がありませんが恐ろしい異常な音がします。なんだか回転を上げると壊れそうな音がします。
A:モーターカンの表目についているステッカーが剥がれています。ステッカーが回りのフレームに打ち付けて大きな音を出しているので確認して剥がれていれば、はがしてしまってください。
Qw33:QRLadybirdのモーター1個が回らない
A:出荷前には100%フライトチェック済みになっておりますので可能性として、希な内容も含めて以下の内容が考えられます。
A1:何らかのグリスかブラシ端子部分の抵抗がある場合、指で取り付けられているプロペラを回すと、他のプロペラより回り方が明らかに抵抗があり
鈍い場合、シリコンオイル(溶剤の入っていないもの)をモーターシャフトの根元にたっぷり吹きかけてください。
その後指で回したり少しスロットルでまわしてさらにシリコンオイルを吹きかけるということを数回行うと馴染んで通常通り利用できます。
出荷前には十分に確認しておりますが、もし類似した症状が見られた場合は、上記ご留意ください。
A2:モーターとアームのアッセンブリーを交換された場合、もしくは何らかの影響でワイヤー断線等があった可能性があります。
それをチェックしていただくか交換してください。
A3:内部ブラシ端子焼けか端子故障、または寿命の可能性があります。
Qw34:V120D02S(MINICP)とDEVO7セットを購入したが、離陸しようとするとラダーが効かずぐるぐる回る。初期不良ではないか
A:WALKERA製品については100%フライトチェック後に出荷しております。
特に調整希望されている場合、初期状態でそのようになることはまずありません。
●ジャイロ感度スイッチを変更している(MINICP共通)
対策:スイッチを60%以上の位置に変更するか
感度を調整してください。 初期設定状態で50%以下だと回ります
最初のメーカー設定でもスイッチがヘッドロック出来るスイッチ感度とノーマル感度の50%以下のものが設定されています
もしスイッチが50%以下側の場合もそれだけで回るかもしれませんのでスイッチを変更するか感度を上げてください
●ぶつけた衝撃でテールドライブギヤが欠けている
(ヘッドとテールを手で押さえて回して連動して回っているか滑っていないか静止状態で確認できます )
特にテールシャフトとのかみ合わせの内径Dカット部分が舐めているかもしれません。
その場合は外して確認しないと外観カラでは確認ができません。
対策:サービス予備品でセットに含まれているギヤに交換してください
●前方テールドライブギヤが抜けている
(ヘッドとテールを手で押さえて回して連動して回っているか滑っていないか静止状態で確認できます)
対策:スキッドを外して、メインギヤのピンを抜いてギヤを外し、アルミのカバーを外すと見えます。
これは外観から目視できないので実際に確認してしっかりはまっていることを確認してください
部品を目視で確認後に付け直すか交換してください
以下の分解図をご参照ください。
クリックすると大きくなります
画像をデスクトップ等に保存して確認してください
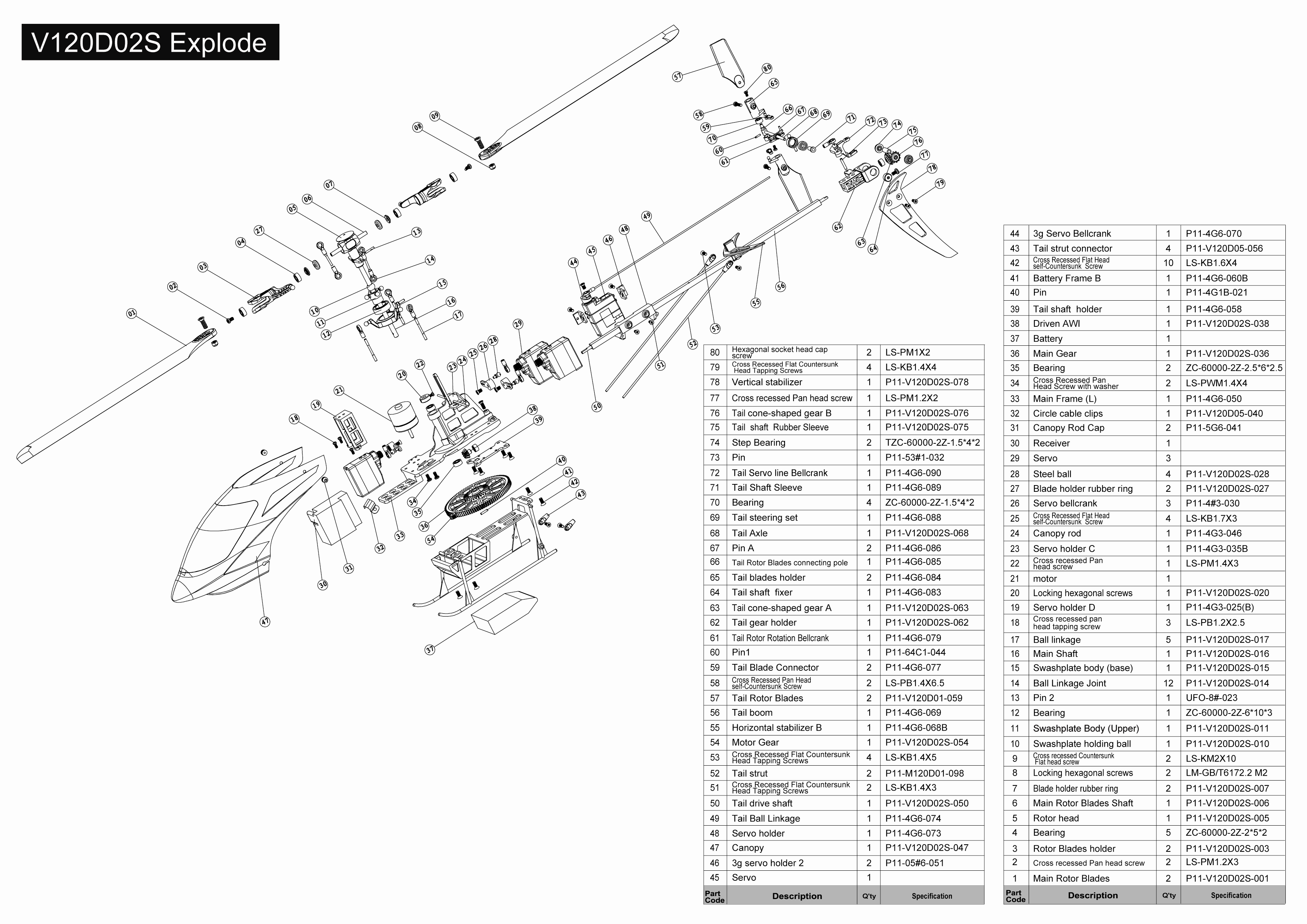
抜けることがありえるのは、38番のギヤです。
対策としてホームセンターのゴム系接着剤等がよいかと思います
ゴム系の場合固まるとゴムのようになるので後で取ることができますが
完全に接着するような物は利用しないほうが良いです。
テールローターの地面接触等で時々起こるギヤ欠けの場合
76番のギヤの内径側のDカット部分が舐めている為外観からは確認できないケースがほとんどです。
セットには万が一の為に無料サービスで入れているギヤが含まれておりますので必要に応じて交換してください
Qw35:DEVO12Sを充電したが充電ができない。電源を入れてもすぐに画面が消えるようになった。
A:付属バッテリーの性質はリポバッテリーです。もし使い切り状態で過放電してしまった場合再充電できなくなります。
その場合はバッテリーを交換しなければなりません。
確認方法としては電圧テスターで電圧チェックしてください。
1セルバッテリーと同じですので満充電で4.2V標準電圧3.7V最低でも3.2V以上ないと充電できない状態と思われます。
もし3.2Vを切っていて3V未満の場合過放電状態です。場合によっては
裏技的方法として、GA006の充電器とMOLEXオスコネクターを利用して強制的に充電をすることで復活する場合がありますが
通常はバッテリー交換をしていただく必要があります。
Qw36:WALKERAフルセット全般でバインドの時、ID固定は面倒だしRANDAM設定(初期設定状態のバインド)で簡単にできないものか
A:方法があります。
通常のRANDAM(初期設定状態)でのバインドでは、送信機と受信機の電源を入れて送信機の画面が操作できない状態になっているので
それを最後まで待っていると非常に時間がかかります。
これをショートカットできます。
まず送受信機の電源を入れます。この時受信機のLEDに注目してください。
LEDは最初早い点滅になります。バインド準備すると一度点滅が止まり点灯になります。
この状態でも送信機側は、まだ完了していない画面になっていますが、実際はこの状態でバインド準備が完了しています。
受信機が点灯状態になったら、エルロンスティックを右か左に動かしてください。
すると受信機のLEDはゆっくり点滅(約3回位)その後常時点灯しています。
送信機側の受信機サーチ画面が強制終了します。
これでショートカットできますが早すぎるとバインドデーターが一部失敗している場合があるので
バインド後は離陸前に必ずそれぞれの動きが正しいかサーボ等動きを確かめてください。
※もしこれらのタイミングがよくわからない場合は、送受信機が完全に画面が自動的にスタンバイ状態になるまでそのままお待ちいただいてから
ご利用ください
Qw37:InfraXとDEVO4のセットを購入して利用していたがあるひ突然バインドできなくなってプロペラは一切回らなくなった
送信機からピボー、ピボーと一定感覚で音が鳴る。スロットルエラーかと思い、スティックを動かしたが変化なし。もう故障したか?
A:これはスロットルエラーです。スロットルが上がっているか上がっているのと同等の状態としてトリムが50%以上上がっています。
50%以上上げた状態で一度送信機の電源を切ってしまうと
もう一度電源を入れた時にスロットルをあげたり下げたりしても反応がなくトリムも効かない状態で警告音を鳴らしています。
この場合は裏のうえの方に四角いゴム窓がありますのでそれを開けてTHRの部分のスイッチを一度今の状態から切り替えてみると
送信機の起動音が鳴ります。その時にスイッチを戻してすぐにトリムを一番下まで下げてください。
これでまた通常通り利用できます
Qw38:GeniusCPV2で送受信機のバインド完了してスロットルを上げたところメインローターが回転したが、すぐに回転は止まって
モーター無反応で受信機の赤いLEDが点滅している。故障しましたか?
A:バッテリーがおそらく3.5V以下になっている可能性があります。
まず満充電で行ってください。電圧が下がりすぎるとそのようになります。
Qw39:LadybirdV2で、通常フライトは可能です。しかし、AIRSTAGEのマニュアルに沿ってモード切り替えを行ったができなかった。もう一台持っているので
テストしたがそれは出来た。従ってモード切り替えできないセットは不良ではないか。
A:通常フライトが出来る場合は正常とお考え下さい。
モード切り替えできないのはあくまで上下のスティック操作が認識できていない為です。
その原因としてDRモードスイッチを入れていることが関係している可能性があります。
DRモードになっている為に上下の動きが制限された状態になって認識できていないかもしれません。
もしできない場合はDRモードスイッチを押してノーマル状態にしてから行ってみてください。
Qw40:DEVO12Sを購入後、飛行機モードに変更しただけだが、付属のRX1202と非常にバインドしにくい。翌日行ってみるとバインドが全くしなくなりました。
A:DEVOシリーズ送信機はファームウェアー更新によってデーター修復できるようになっています。
以下のような方法で修復出来る可能性があるので一度ご確認ください。
最新のファームウェアーv1.4Bでは、ヘリコプタータイプでは問題なくバインドできて飛行機タイプやグライダー等他のタイプではバインドしにくくなるという
現象が現れることがあるようです。
原因が明確になっておりませんが、
一つ前にファームウェアーv1.3Bでは、これらの問題が解消されるケースがあります。
この場合、まずV1.3Bにファームウェアーの更新を行いデーターを入れ替えてください。
この入れ替えによって問題は解消される可能性が高くなります。
※この時、ライブラリーも一緒に更新してください。
この1個前のものと後のものでは大きな差はありませんので
問題なく快適に利用できる方を選択してご利用ください。
Qw41:DEVO8S設定後電源が切れなくなった。すぐに起動してしまう。LCD画面をよく見るとトレーナーコード接続マークが出ていて消えない。
購入して間もないので不良ではないか。
A:出荷直前に確認しておりますので輸送中か到着後何らかの振動によって影響を受けた部分があります。送信機内部再接続が必要なパーツがあります。
電波法に関わるところですがサポートを受けながら処理していただければ合法的に安全で簡単に治ります。
まずは販売店にお問い合わせいただきサポートを受けてください。
Qw42:GeniusCPV2のフルセットで購入後箱だしでチェックしたがハンチングが出る。送信機ゲイン調整しても収まらない。
A:いくつかの一般的なハンチングの理由が考えられますが、送信機で調整しても治らない場合は、
類似したヘリも含めてバックラッシ(モーターピニオンとメインギヤ)が関係している場合があります。
ここが浅いとハンチングが出ることがあります。一般的なハンチングの機序から考えて不思議に感じる方もおられるかもしれませんが
これは実際にこのような症状がでた場合は少しバックラッシをきつくしてテストしてみてください。
かなりの確率で収まります。
Qw43:V450D03を購入してテストした。ホバリングテストしてあるはずだが、1個のサーボの接触が悪いことが確認出来た。
A:100%出荷前に確認済みでホバリングテストも行っておりますが
事実上もし箱から出してすぐに確認してその場合は申し訳ございません。
メーカー工場側でサーボコードをタイラップで固定していますがきつくなっている場合があります。
これが原因で引っ張られてサーボコネクター端子が広がってしまっている場合は本当にごく希に起こってしまったと思われます。
以下のような方法で対処可能です
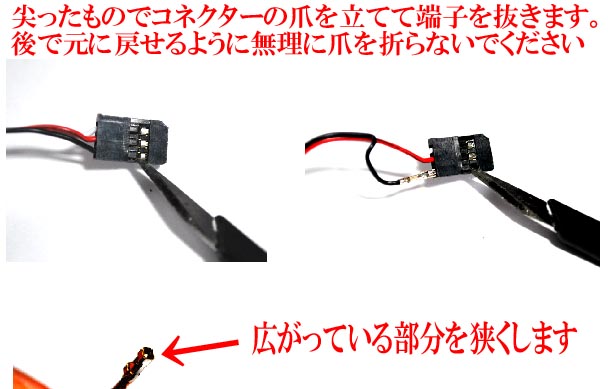
弊社では、今現在ここも含めて出荷前にチェックを行って出荷しております。
Qw44:LadyBirdV2を購入して10回以上フライトしたので初期不良ではないが、バインドしなくなった。もう故障したのか。
A:実際のところ何らかの理由で故障している可能性はありえますので現状では確定的なことは言えませんが
まずBAINDプラグを利用してID固定のキャンセル操作を行ってください。
それでもバインドできなければ、故障している可能性はありますが
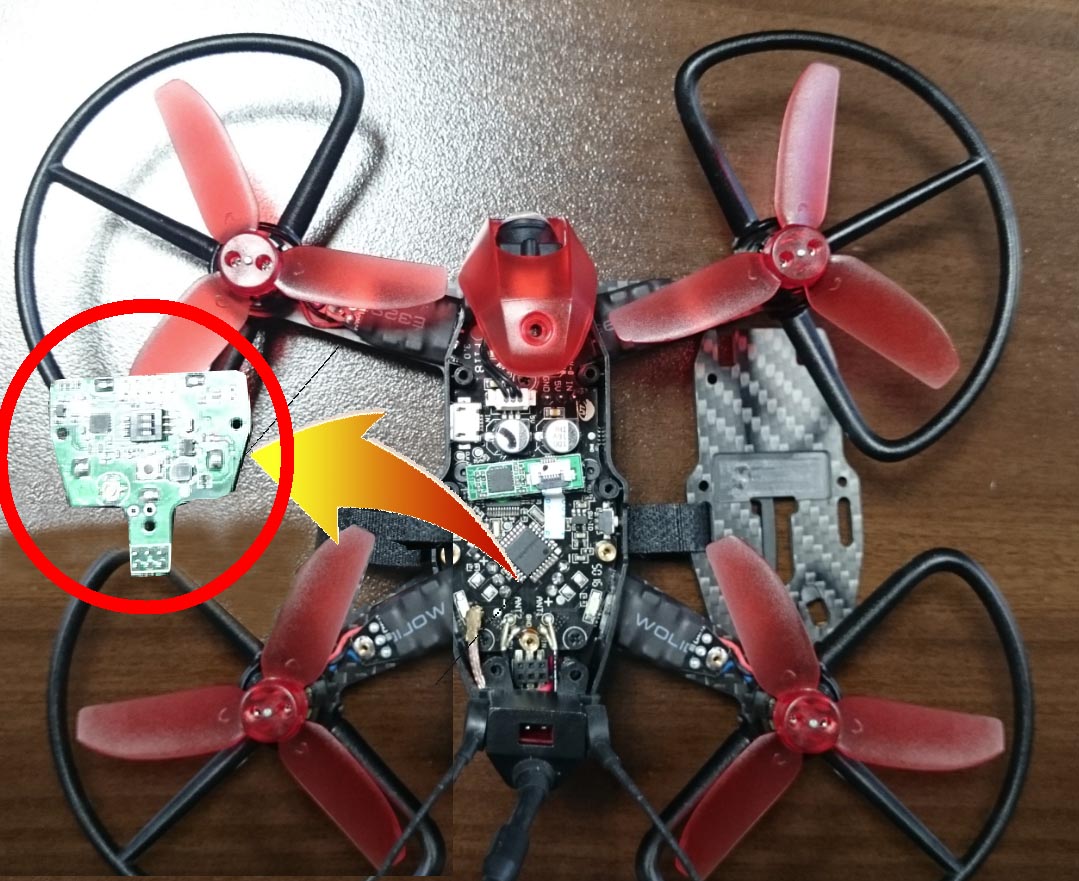
まず以下の裏技をおこなってテストしてみてください。
送受信機の電源を入れてください。
その後、すぐに以下の画像の矢印の部分の端子を指でグッと押してそのままにするとLEDの点滅は止まってバインドします。
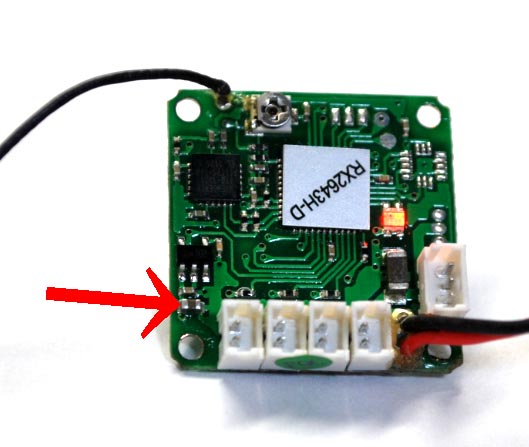
その時指は離さないでください。
そのままモード切り替えでLED緑になるか等確認しバインドが正常にできていることを確認します。
指を離すとバインドが解除されてまたLEDは点滅すると思われます。
これを何度も繰り返して数回行ってからバインドを維持したまま少し時間を起きます。
それからまた繰り返すという方法を行うと指で行わなくてもバインドできるようになります。
これを何度行っても不可能な場合は、故障している可能性が高いとお考え下さい
Qw45:DEVO8S(他DEVO6以上のシリーズ共通)でエルロン(又は他の方向)のスティック操作をすると変な動きが交じるか動いたり
動かなかったりした。受信機かサーボか送信機が故障したのではないか
A:サーボのギヤ欠けで似たような症状がでることがありますが
最初にこの問題が起きたと感じた時、送信機のアイコンでMONITORというアイコンをクリックして
スティックの動きを画面上で確認してください。それぞれの動きをスティックで動かしてどのように表示されているかをみます。
この時、問題の方向等の操作をした時に表示も問題がある動きを示した場合、
スティックセンサー部分の故障等が考えられますので
内部部品交換が必要です。この場合まずは販売店等に、ご相談ください。
もし、ここに問題が無い場合は、指で軽くサーボホーンを少し抑えてサーボを動かしてください
ガリガリという音と共に空回りしている場合はサーボの内部のギヤ欠けしていると思われます
その場合はWALKERAではギヤのみの販売を行っていないためサーボの交換を行ってください
Qw46:DEVO8S(他送信機共通)でスタントモードでスティック最下位でスロットル100%にしたいがカーブの図や実際の数値が85%程度になり
100%にならない。
A:スロットルトリムが下がっていることが影響していますので、トリムを上げてください
Qw47:初心者です。V450D03を購入しスタートさせようとするとモーターがカリカリ言ってスムーズに回らない。フライトチェックされているのでは?
A:原因は他にもある場合がありますが
まずは、キャノピーを外して設置したバッテリーのワイヤーがモーターに接触していないか確認してください。
モーターはアウトランナータイプで外側のカンが回りますが、ここにバッテリーのワイヤーが接触して
スタートエラーを引き起こしているかもしれません。
Qw48:NewV120D02Sを(V450D03・UFO関係等他WALKERAすべてに共通)で、スワッシュプレートの動きがおかしい、ジャイロが動いていない、離陸しようとしたら、横にスライドした、ホバリングしたら急に横に転倒して倒れて壁に激突した。不良ではないか。
A:これらすべては確認方法に重点をおいてチェックしてください。
セット関係はすべてホバリングチェック済みで出荷しておりますので
不良のように見える場合は一定の条件下で問題が起きている可能性が高いです。
この問題はWALKERA製品利用や販売経験者の方でも時々ございますので十分に詳細ご留意いただく必要がございます
まず、機体を水平な状態を保って電源を入れます。
本来送信機の電源を先に入れますが失敗される方が多い為、
ワンポイントとして、機体の電源を入れて水平状態に置き、
5秒以内に送信機の電源を入れてください。
タイミングが把握できればそれほど急がなくても良いです。
送受信機のバインドができたら、スティックを動かしてスワッシュプレートの動きを確認してください
離陸前にこれらを行う事は必要です。
この時点で、機体を水平に置いた状態で
スワッシュプレートが正く動いていて、ニュートラルでは
スワッシュプレートが水平になっている場合それは問題ありません。
機体は電源が入って送信機とのバインドがされる時に、自動で水平を認識しようとしますが
もしこの時、完全に水平でない場合は水平を誤認してニュートラルを出します。
この場合水平を保たないで電源を入れていたり
電源を入れてから水平に置くまでの間に送信機の電源を入れて
認識がされた場合、問題がおきます。
サーボが動くまでの間に水平に置けば問題がないということではありませんのでご注意ください。
このタイミングは送信機側と受信機側の両方の電源を入れたときのタイミングで決まりますが
そのタイミングは外観から判断不可能です。
その為、基本水平で入れることと
スワッシュプレートの動きがおかしい、離陸時にサイドスライドしてしまう等があれば
それは失敗ですので
送受信機のバインドできていれば、送信機の電源はそのままで、機体の電源だけ水平状態で入れ直してください。
また、ラダー以外はヘッドロック状態ではそのまま静止状態で機体を傾けても
ジャイロ反応が見られない機種があります。
どうしても静止状態で確認される場合は、安全の為にモーターの配線をすべて抜いた状態で
スロットルを上げて機体を傾ける等を行ってください
これでジャイロ反応が見られます
ラダーについて、フルセットの初期状態は、ラダージャイロスイッチ
例えばDEVO7Eの場合はHoldスイッチが上で”0”の状態です。
この時受信機には赤いLEDが点灯しております(ジャイロ感度が60%以上)
スイッチが下の状態で”1”のスイッチの状態では
受信機のLEDは消灯しておりLEDはついておりません
(ジャイロ感度50%以下)
このような設定になっておりますがジャイロ感度50%以下の状態では
ラダーの反動トルクが抑えきれずジャイロが単に反応していないようにみえます。
このような症状とLEDの状態も正常でありえる事をご留意ください
スロットルを少し上げた状態では確認できるようになっています
WALKERAの機種ではすべてに共通しているので
これらに反して行った場合は一件不良のように見えると思いますが
すべて正常でも、一定条件で問題が発生することをご留意くださいますよう
よろしくお願いいたします
Qw49:DEVO送信機とWALKERAヘリで動作確認しているが動きがおかしい。特に送信機を変えると正常だがセットの送信機で操作するとエルロンが動かない
A:この場合は送信機側に何らかの問題がある可能性が考えられますが
他のFAQの内容を参照しても解決しない場合は、まずLCDモニターのアイコンでMONITORをチェックしてください
すべてのスティック動作確認してください。もしエルロンが動作しない場合はエルロンを入念にチェックしますが
この時、エルロンのスライダーが動かない場合等があれば中のコネクターが外れていたか抜けかかっていたというケースがありますので
確認してみてください。
Qw50:QRX350でGPSホバリング、ゴーホームしないなぜ?
A:スキッドについているコンパスを正く接続することとGPSキャリブレーションを正く行う必要があります。
ゴーホームの場合でゴーホームしないよくあるケースでは、マニュアルモードからゴーホームに入れて操作し続けている場合です
ゴーホームのスイッチを入れた場合、操作スティックには触れないでください。
もし、触れるとゴーホームよりも操作のほうが優先されます。
Qw51:DEVO12Sを半年位利用していたがある日LCD画面がつかなくなった。本体上の赤い電源ランプの切れなくなった
A:基盤故障の可能性がありますので有料になりますが修理依頼等、販売店にご相談ください
Qw52:V450D03(全メーカー他テールピッチ仕様機種共通)で、離陸前ラダーを動かすとスライダーが中立に戻らない。不具合ではないか
A:この状態はヘッドロックで見られています。もしイメージされているように中立に戻る場合はラダージャイロ感度を限りなく0に近づけると
すぐに中立になります。
もしくはヘッドロックが効かないようにするなどです
この場合は実際の機体の挙動を無視した中立ですので、実際にこの状態でホバリングするとハンチングするか
回転するなど制御が難しくなります
ヘッドロックジャイロ効果が得られている時に、ラダーを動かしても、静止状態の確認では、実際の機体が動いていないのでスライダーはその状態を維持しています。これはヘッドロックがスティック操作に対して機体の動きに合わせてジャイロコントロールしようとしている自動制御反応です。
静止状態で確認されているだけでは、このようになります。
中立に戻ることが正常と思われるケースが多々ございますので異常とは分けてお考え下さい。
Qw53:QRX350は社外送受信機を利用できるのか?
A:利用可能です
しかしご注意点としてそれらを利用するための接続方法や設定は記載されておりませんので
プロペラを外して動作確認する
モーター解放がラダー右でできる事を確認する
フライトモードスイッチをGPSモード、ゴーホームモードに入れていると
モーター解放ができない
これらの特性を理解し、スキッドをつけた状態で離陸直前で各動作方向の確認をしていただければ
無理にフライトすることなく動作確認していただくことができます
以下実際に弊社テストでの接続例を記載いたします
HITECオーロラ9接続例
ELEV-2CH(NOR)
AILE-1CH(REV)
THRO-3CH(NOR)
RUDD-4CH(REV)
GEAR-5CH(NOR)
AUX2-7CH(NOR)
Qw54:NewV120D02Sホバリング調整中失速して不時着、再度離陸しようとしたところ、モーターがカッカッカと動いて回らない。指で補助すると回転する。不良ではないか
A:この場合、もし不良のケースの場合、最初から動作しないのが基本的なケースなのですが、最初動作していてこのようになった場合、各緩みが原因です。
メンテナンスが必要なのでまずは以下ご確認ください。
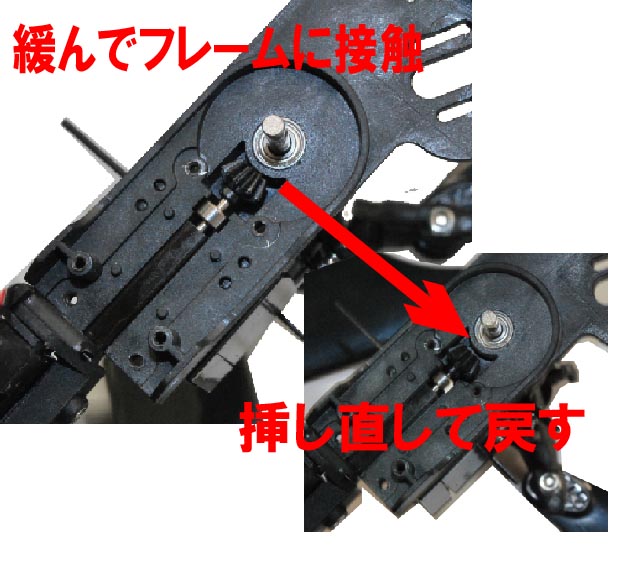
フライト中に失速した理由は以下のテールドライブギヤに当たる前側の部分でメインギヤの上に位置している場所です
このコーンギヤが緩んで以下の画像のようにフレームに接触すると指で回して軽く回っているようでも
このモーターに関しては負荷となって失速したり動作しにくい状態になりますので
まずここを確認して元に戻してください
この部分に関するさらなる情報は
以下の類似事項FAQをご参照ください
また、動作しないために分解してバックラッシ等をずらしてしまった場合
わからない状況に陥る事があります
バックラッシとは以下の画像でモーターのピニオンとメインギヤの間の事です

この部分が正く行われていないと、問題は出やすくなります。
一般的にはバックラッシはコピー用紙1枚分くらいの間を開けると言いますが
この機体の場合はそのように行わないでください。
目安としてはギヤにギリギリ引っかかるくらいで最初調整して、モーターを軽く回します。
この時メインギヤとピニオンがすれてしまう場合はもう少し奥に入れます。
このようにして行い、ある程度のところで
、モーター側のカンを指で抑えて固定して、メインギヤを指で軽く動かします。
この時ピニオンとメインギヤの間で隙間ができて、モーターが回るまで少し距離があるように設定する必要があります。
このようにしないと、モータを正常に回すことができません。
イメージとしてはモーターが少し回って勢いついてから、メインギヤの歯にピニオンが当たるというイメージです。
この手のミニタイプのアウトランナーブラシレスモーターは、振動を抑えるため低回転付近の
パワーが低くなっています。(WALKERAに限らず全般です。)
その為、正くメンテナンスを行わないと始動エラーが置きやすくなります。
これはモーターやアンプが問題ではないのでご注意いただく必要があります。
このミニブラシレスモーターをフレームから外して回したときスムーズに回る場合
それは正常ですので
上記のような状態を疑ってメンテナンスをしていただく必要があります。
この確認の時、特性を確認していただく為に、試しに軽くモーターを回すか
回す前に指で軽く指で抑えてください
その時にカリカリと言って間歇的に回って止まる等の症状が見られます
止まったときに無理にスロットルを上げるとモーターは発熱します。
これは強さの程度によりますがV450等の大きなブラシレスアウトランナーモーター等でも
同じように行えば見ることができる症状で、アウトランナーモーターの共通事項となります。
このような特性をご理解いただき上記メンテナンスをご留意ください
Qw55:QRX350でフライトタイムが短い、ファームウェアーを更新してみたが変わらない。なにか機体に問題があるのではないか?
A:機体にスイッチやジンバル等加工されていないでしょうか。
実例として容易に入手可能なカー用品等のコネクター等を利用して、トグルスイッチをつけているケースがありました。
この場合、この灰色のコネクターは消費電力が大きいので、出力等の時の瞬間的な消費電力が大きくなり、いわるゆるLoss電力が大きくなります。
これが大きくなると、バッテリーを外して電力を計測した時の電力はまだフライトできるはずの電力であっても、電力Lossが大きくなります。
例えば、1セルあたり3.9Vであっても、Lossが大きいと出力時、3.6V位まで落ちているので、低電圧保護機能が働いてしまいフライトできなくなります。
これはこのような加工を撤去して元に戻せば治ります。
Qw56:RXFモジュールのついた双葉S-FHSS対応のMASTERCPを購入した、いろいろ設定して電源を切った後、バインドできなくなった。これは不良ではないか?送信機は双葉T6です
A:送信機はT6もT8Jも利用できます。設定されている中でパラメーターの設定を変えられたと思いますが、その時にRXの部分を変更されてしまったと思われます。標準はS-FHSSですが、これは変更するとFHSSにすることができますここは、FHSSではバインドできません。必ずS-FHSSにして利用してください
Qw57:QRX350+DEVO7で数回フライトした後、再度飛ばそうとすると、モーター開放ができない。左側のLEDが素早く点滅して消えるなぜか?
A:日本語マニュアル記載のとおり、まずはMIXスイッチをノーマルフライトモードにしてモーター開放してください。他のモードではモーター開放ができません。
もしノーマルモードにしていることと、送信機の設定は変えていないはずという場合は、一度送信機のデーター内で、モデル選択で”モデル2”を選択し、
それから電源を入れ直してバインドしてください。その後モーター開放すると可能になっていると思われます
もう一度モデルを戻して問題がなければよいですが
万が一問題がある場合は
モデル2の方で、説明書を参考にデーター入力してご利用ください
モデル1のほうはリセットでデーター消去したほうがよいです
これで解決できない場合、個体差によって、多少の較正ズレでGPSモード側に少しスイッチが寄っているかもしれませんので、
そこからから離す意味でエンドポイントで少しGPSモード側から離すように数値設定して確認してみてください
考え方としては、左LEDのモーター開放時の早い点滅は、あくまでGPSモードやゴーホームモードに入っているということが原因ですので
これらのモードから抜けていないと考えての上記調整です
Qw58:QRX350Pro(DEVO-M)は、GPS較正だけで、ジャイロ較正や電圧設定などできないのか、ソフトウェアーなどを含めて機能がないのか
A:DEVO-Mは標準ではGPS較正だけできるようになっており他は行わなくてもよいものとなっています。
ただし、利用しているうちにジャイロがずれたような感じになるとか、電圧設定を変えたいなどがあると思いますが
通常はメーカーは、ソフトウェアーなどをリリースしていないので、設定できないということになってしまいますが、
以下の海外情報サイトをご参照ください
RCgroups.com参照ページ
WALKERAでは自社開発以外の、特殊なソフトウェアーをベースにしてDEVO-Mを作ったと思われます。
送信機のキャリブレーション
ジャイロキャリブレーション
ウェイポイント
バッテリー定電圧保護設定数値の変更など
ほぼすべてができるようです・・
弊社も実際に一部の機能だけを試しましたがすべてがどこまで対応できるかは、検証中です。
状況的にマニュアルがなく、このソフトを利用することによる問題などは
もちろん何等かの保証はできるものではありませんので
ご利用の場合は自己責任にてお願いいたします。
利用方法参考動画
ソフトウェアーダウンロードページ
もし使いこなすことができれば
非常に多くの機能を持った製品となると思われます。
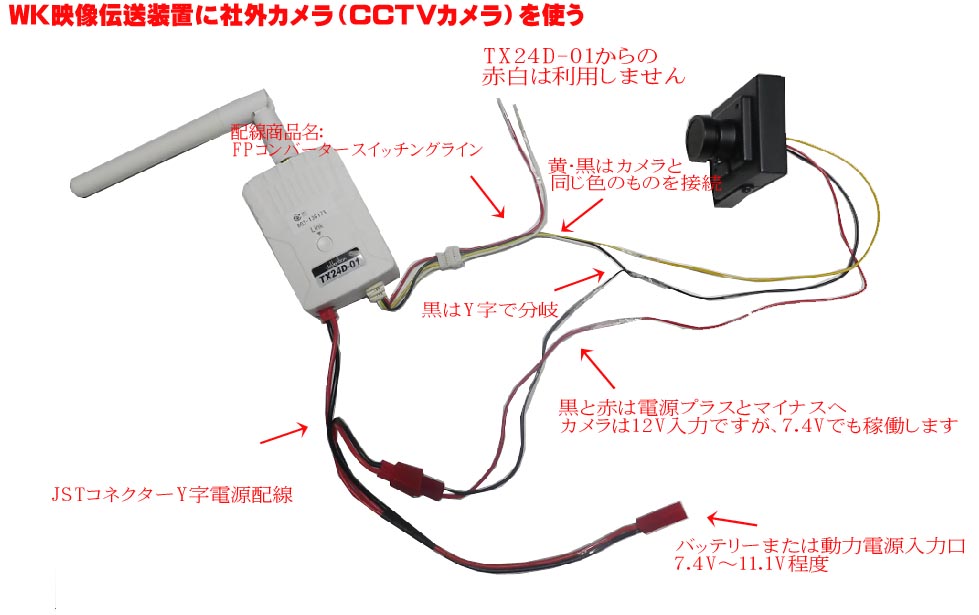
Qw59:TX24D-01について、こちらを walkera runner 250 に取付は可能でしょうか。送信機は対応機種に変更します。
A:runner 250 のカメラを下図のように配線いただけましたら、ご使用は可能です。
ただ、積載重量が増えること、2.4GHzを使用しているため、アンテナおよび機体の向きにより
映像が途切れたりしやすく、また5.8GHzに比べて遅延があるためレース向きではございません。
Qw60:RODEO110について、5.8GHzの映像送信が標準で組み込まれていますが、使わないので停止方法を教えてください。
A:5.8GHz映像電波を停止させるにはユニットを外すしかございません。以下画像のようにユニットを外してください。
|







 DJI 産業用 ドローン (測量・空撮)
DJI 産業用 ドローン (測量・空撮)
 DJI 農業用 ドローン(農薬散布)
DJI 農業用 ドローン(農薬散布)
 DJI RoboMaster
DJI RoboMaster


















 (一般通販禁止品・AIRSTAGEグループ窓口にて)◆DJI農業◆【注文後生産状況確認し請求書送付】")



(T70P)(一般通販禁止品・AIRSTAGEグループ窓口にて)◆DJI農業◆【注文後生産状況確認し請求書送付】")
(22.30.100.0014)")