
トラブルシューティング (FAQ)DJI - ドローン総合事業|販売|DJI|INSTA360|CHASING|FRSKY|BETAFPV日本正規代理 AIRSTAGE (エアステージ)
カテゴリー
-






 DJI 産業用 ドローン (測量・空撮)
DJI 産業用 ドローン (測量・空撮)
- 産業用【本体】
- 産業用【部品】
- DJI Matrice 4シリーズ 部品
- DJI Dock 3(Matrice 4D)部品
- DJI Dock 2 部品
- FlyCart 100 部品
- FlyCart 30 部品
- DJI Mavic 3 Enterpriseシリーズ 部品
- Matrice 30シリーズ 部品
- Matrice 400 部品
- Matrice 300 RTK 部品
- Matrice 350 RTK 部品
- Matrice 200 シリーズ 部品
- Matrice 600 部品
- Matrice 600PRO 部品
- Mavic 2 Enterprise Advanced 部品
- DJI Mavic 2 Enterprise 部品
- S1000Plemium 部品
- 産業用【カメラ・ジンバル】
- 産業用【SPオプション】(CZI)
- その他 アクセサリー
 DJI 農業用 ドローン(農薬散布)
DJI 農業用 ドローン(農薬散布)
 DJI RoboMaster
DJI RoboMaster















- - ツール・アクセサリー他
- - バイク用品・教習
- - ミニセグウェイ
- - 書籍(Books)
- - ラッピング資材
- - 事務用品
- - 期間限定商品
- - 予約販売品
- ◆ AIRSTAGEメンバーズ商品
- D
ベストセラー
-
01
- 今日から30日間の集計
- 新着情報ページ
WEB通販営業日
-
2026年6月 日 月 火 水 木 金 土 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30




 (一般通販禁止品・AIRSTAGEグループ窓口にて)◆DJI農業◆【注文後生産状況確認し請求書送付】")


(T70P)(一般通販禁止品・AIRSTAGEグループ窓口にて)◆DJI農業◆【注文後生産状況確認し請求書送付】")

(22.30.100.0014)")



![]()




トラブルシューティング (FAQ)DJI
| Qdj1:Wookong-Mを完成させたが、較正の青いランプがつかないので設定ができない A1:アシスタントソフトウェアーでTXキャリブレーション設定画面を見てください。 5番のコントロールモードスイッチがそれぞれ送信機のスイッチを入れた時にGPS、A、Mのところに収まっているか確認してください 最初は多くの場合、Aのところにスライダーがあり、Aが青くなっています。 スイッチするとずれているケースがありますので、送信機のエンドポイントを調整して収まるようにしてください。 ※3ポジションスイッチを利用しますが中間位置にした時、Aのところにソフト上のスライダーが来て青くなっている場合はよいですが もしこれがズレている場合はサブトリムでニュートラル調整してください。 その後GPSやMのところにスイッチさせてスライダーが移動して青くなっているか確認します。 もしズレている場合はエンドポイント(=トラベルアジャスト)を調整します GPSキャリブレーションは失敗しても何度かスイッチを試していただくと、青く点灯します。 (NAZAの場合は黄色) スイッチは早すぎないように数を数えて往復で1と数えながら10回程度スイッチさせます。 1秒で往復位か少し早い位で確実な数を行っていただくとうまくいきます。 A2:GPSキャリブレーションで水平が出来るが垂直が終了できない場合 LEDの何の色を問わず、まずは垂直方向のキャリブレーションして、その後は水平のキャリブレーションを行います。 終わってから、通常のように、水平のキャリブレーションして、垂直方向のキャリブレーションします。数回を繰り返します。 ※垂直キャリブレーションのとき機体の機首は下を向けてください A3:GPSキャリブレーションモードに入っているが、失敗する。または終了しているハズなのに、PCで確認するとGPSabnormalなどのエラー表示が出ている場合、それは正く行われていないか失敗しています。GPSモードに確実に入ったあと、水平キャリブレーションの後、垂直キャリブレーションを行いますが、この間になぜかスイッチを操作していたという実例があります。水平キャリブレーションから垂直キャリブレーションに移行する時、角度と動作だけで、一切スイッチなどを操作しません。もしここで操作してしまうと失敗する可能性がありますので御留意ください。 Qdj2:DJIHOBBYの920KVモーター又は社外のモーターの動きが悪い・動かない・ホバリング中モーターが止まる NAZA-M(WKM)の不良か? ※モーターが回らないか動きが悪い状態の時は、何度かテスト確認しているだけでアンプに熱を持ちます。 モーターの問題を解決でき、実際に動作すれば、熱は持ちませんが熱くなっている場合 何らかの問題が発生している場合がありますのでひとつずつ確認してみてください。 A1:DJI920Kvの場合(2012年8月?11月ごろまでの販売品。現在対策済み品が流通しています) :Eリングとスペーサーの抵抗が少しあるかもしれません。一度Eリングを付け直すか、スペーサーをわずかに削って薄くすると スムーズに回ります。(この時ワッシャーが内径ベアリングと外形ベアリングにかぶっていない事を確認してください) 生産時期によってこのスペーサーはプラの場合とアルミワッシャーの場合があり若干の形状違いがあります。 上記メンテナンスをしてみるのが良いです。完了後シリコンオイルをモーター内部や可動部分に吹きかけてください。 A2:固定の為に入り込んだネジがモーターコイルに接触していないか確認してください。 固定されているネジを取り、モーターにシリコンオイルをかけてください。その状態で回してみてください。 もし回るようでしたら、Fフレームシリーズに付いているフレーム用モーターワッシャー(赤い円盤状のもの)を モーターとフレームの間にかませてネジで固定してください。 A3:モーターメンテナンスを行った後、ソフトウェアー上のアイドリングを少し上げてみてください。 ※上げすぎると回転が高回転で問題がある場合がありますので現状にあわせて設定を行ってください A4:もし上記のメンテナンスや設定変更などを行なっても解決しない場合、 (回転負荷が感じられない、スムーズに回るがホバリング中急激にひっくり返るような現象が起きたなど) ご注意点としてセル電圧のずれたバッテリーを利用されていたり古いバッテリーを利用されている場合、 ソフトウェアー上の電圧モニターの設定に問題がある場合などで、急激にモーターがストップする場合があるので この現象と分けて考えなければなりませんので、不明な場合はソフトウェアー上の電圧モニターをOFFにして確認してみると よいかもしれません。 さらにこの状態で確認を行なっても問題が解決しない場合(特にホバリング中にひっくりかえる等)の時は、モーターの故障の 可能性がありますのでモーターを交換することをおすすめいたします。 A5:社外品で不具合頻発報告がある製品で報告のある物は以下のものです RCTimer: HP2814-810KV ESC:HobbykingTurnigy Multistar 30 A これらは問題報告頻発していますので純正品のご利用をおすすめいたします Qdj3:GFC-ERR{8}が出る A1:このコードは、ソフトウェアー上では、上部タブの”About”にある”Error code”内に記載のあるものです。 解決方法は、アシスタントソフトウェアーのTXキャリブレーションを一度調整するためにスタートを押して調整してください。 このエラーはTXキャリブレーションが正しく完了していない時に出るエラーです。 送信機のスティックがマニュアル記載の通りに動いているかをそれぞれの各動作に合わせて確認してください。 最後終了のボタンをおしてください。 正しくTXキャリブレーション完了した後、一度NAZAやWKMのMC電源を切ってもう一度接続して確認してください 解決しない場合、一度USBをPCから外して、送受信機の電源を入れ直し、もう一度送信機、受信機の順に電源を入れ PCのソフトを起動させてからUSBでMCとPCを接続してください。 MCとPCを接続してから少しの間PC側で処理していますので、すぐに反応しない場合がありますので 多少のタイムラグはありますのでご留意ください。 ※TXキャリブレーションを行ってもエラーが出ている場合があります その場合はコントロールモードスイッチ(Uチャンネル)側のスライダーもスイッチを合わせて調整してください 完了後電源を入れ直して確認してみてください A2:双葉受信機を利用されている場合で、S-BUS設定が関係している可能性があります。 もし、送受信機側の設定が正しく無い場合は、接続ミスと同じでTXキャリブレーションが出来ないと間接的にMCが判断して いる場合があります。 この場合は送受信機側の割り当て確認をしていただきますが、よくわからない場合は受信機を一般的な受信機に変更して ソフトの設定はTraditionを選択の上、NAZAやWKMに含まれているコネクターを利用して接続しなおしてください。 Qdj4:WOOKONG-Mで、1度目のフライトが正常にフライトできるが、2回目のフライトになると不安定になる。 A:フライト時、GPSモードで起動フライトしている場合、衛星をキャッチするために1分位かかる場合があります。 1分程度待ってからフライトを試みてください。 LEDのランプの表示によって状況確認が可能です。 Qdj5:NAZAアシスタントソフトウェアーで、ファームウェアーのアップロードが途中で終了して先に進まない。 A1:ネット回線エラーが出ている場合、回線のエラーです。混乱されるケースの一例としてはそのまま他のサイトや メール等ができるので回線エラーがないと判断されると思いますが、利用されているルーター内には、キャッシュが記憶されており その部分にエラーがでていたり、以前の違うURL等が入ったまま等の時には、このような問題が生じることがあります。 お使いのルーターの電源プラグを抜き差ししたりリセットするなどで、一度再起動してください。 A2:ソフトウェアー内の一部の表示がPCか環境のせいで大きく表示されており、外枠で隠れていて、確認ボタンがみえなくなっている 場合があります。その場合はマウスでクリックできないのでキーボードの”TAB”を利用して見えない部分の確認ボタンを押す操作をしてください。 A3:何らかの関係で利用されているソフトウェアーが現在のオンラインアップデートとうまく作動していないケースがあります。 その場合は一度新しいソフトウェアーをダウンロードして利用してください。 正常に動作することを確認した後古いソフトウェアーは(コントロールパネルより)アンインストールして削除してください Qdj6:WOOKONG-Mと社外機体を組立て正しくセッティングしているが、操作コマンドを入れていなくても勝手にモーターが動く A:ESCの信号がWOOKOMG-Mと合わないかもしれません。情報等で確認出来ているものでは、Xaircraftというメーカーの物は 適合せず勝手にモーターが回るなど不具合が出るようです。 (他TURNIGYというブランドでも不具合報告がありますが他社メーカーの為詳しい相性は不明です) ほぼこれらの問題は純正を利用して解決していますので 別のESCを利用していただくか、純正ESCを推奨します。 他にも相性の悪いESCがあるかもしれません。確認がとれないようなESCの利用はおすすめしません ※ESC出力では、refresh frequencyが、400Hz以上のものを選択してください ※トラベルミッドポイントは1520μsのものを利用し700μsの物は利用しないでください 問題のESCを取り付けられれば、どこかへ飛んで行ったり、怪我や損傷の原因になります。 もし純正ESC以外や設定のできるへ利用ESCを利用される場合は、必ず個別にMCを通さずに接続して設定し、 ガバナーOFF,ブレーキOFF,ノーマルスタートに設定してください。製品によってはスロットル範囲を設定して全てのESCが 同じスタート位置になるようにしてください。 さらにESCの赤線をカットして内部BECをカットしてWKMのPMU(BEC)からの電力を利用します。 詳しくはマニュアルに記載しておりますので今一度ご確認ください Qdj7:WOOKONG-M(NAZAM)でトリムが合わない(ソフトウェアー上のスライダー調整)、GPSの精度が良くない A:アシスタントソフトウェアー内のTOOLの中からアップデートを選択して、ファームウェアーの更新を行なってください または機体の電源を切ってもう一度電源を入れる等を行ってください。 その他、送信機のNORとREVソフトウェアーのNORとREVについて組合わせを変えてみてください。 その上で電源を入れ直しもう一度行う等いくつかの方法を行ってください。 もし他の送受信機をお持ちの場合変えてみてください。 特に送受信機の組み合わせで、送信機の社外受信機を利用されている場合うまく動作しない場合がありますので 純正の組み合わせにするようにしてください 送信機側のボタントリムでは調整しないでください 上記を行っていただきそれぞれの動きをだして全開のスティックを操作した後ゆっくり中央に戻すようにしてみてください ※スティックをぐるぐる回すようにせずに一つずつ行ってください GPSについての特定問題は再度GPSキャリブレーションを行ってください。 これも屋外で必ず行っていただき屋内では行わないでください 類似した内容の事項が他の質問から確認できるものがある場合がありますので他のトラブルシューティング項目も参考にしてください 上記を行っても改善しない場合、各配線をねじって束ねていないか確認してくださいねじって束ねることは信号を乱す可能性がありますので 必ず伸ばして利用してください。 また、各メカは出来るだけ離してテストしてください Qdj8:WOOKONG-Mで機体が後ろに下がってしまう A:対処方法は以下の通りです 1. 機体の重心が中心にあることなどを確認してください 2.ソフト上のTXキャリブレーションを確認してください。中央(グリーンの位置)にあることを確認してください 3.MCの電源を入れたとき5秒間程度は機体に触れないでください。正しいニュートラルを認識中に移動させると誤認します 4.送信機の電源を入れたとき5秒間はスティック操作をしないでください 5.GPSのキャリブレーションは行う必要があります。 ※TXキャリブレーションを行う時トリムボタンやサブトリムは完全に中央にあることを確認してから設定を行なってください その他、GPSモードの場合はGPSキャリブレーションをもう一度行ってください 特に屋内ではなく屋外で行わなければならないことにご注意ください。 Qdj9:WOOKONG-M(NAZA)のモーターが動かない(起動コマンド操作をしても動かない)(他にもNAZAを持っているが交換すると正常等) A1:可能性を以下に挙げます 1.TXキャリブレーションの設定がうまくいっていない 2.送信機やアシスタントソフト上の各トリム調整がニュートラルになっていない (送信機のトリムボタンやサブトリムも全て中間位置のニュートラルになっていなければなりません) ※スロットルのNORやREVも逆の場合も動作しません。 これらが考えられます A2:ソフトウェアー上の「MC Output Off」が緑色になっているかどうかを確認してください。 もし赤い色になっている場合、書き込みができませんので、一度アンプとMCの接続を外して見てください。 その後に、正しく設定したものを書き込み処理してください。 うまく書き込みが出来ていない場合は、正常にモーターが回らない場合があります。 A3:ソフトウェアー上帯からTOOLを選択し、アップデートを行なって見てください MCに何らかのバグが出現してしまった場合でも新しいファームウェアーに更新することによって 改善する場合があります。 A4:状態表示をするLEDの光が何かを警告している場合があります。 マニュアルをご参照いただき、状態が何を意味しているかを確認してください A5:追加報告事例としては、該当事例では、モーターが動かない以外のMCの状態は ? PCに繋ぐとLEDは緑が点灯したままであった。(正常を意味している) ? USBケーブルを外すとLEDはオレンジ速い点滅であった。 LEDの点滅の意味が取説では?の意味は”PCと正しく接続されている”意味?の意味は”TX信号未入力”の意味となっている。 TXの操作でPC上でのキャリブレーション等の操作は可能状態なので送信機とMCは正しく接続されているはず。というケースですが、 これらの原因は送受信機バインドが失敗しているかエラーが起きている可能性があります ※再バインド設定とは、仮に双葉送受信機を利用されている場合は、ハイスピードモードではなく、ノーマルモードを利用するなども 含めた特殊機能を除いた再設定の意味になります。 A6:「TXキャリブレーションを正しく行うことが出来ており、中央にスライダーが一致していて緑になっているので 正しいはずであるが最終的にモーターが動かない・・。」という状況のケースでは 1:アシスタントソフトウェアー上では、スライダーがフルレンジ(全範囲)動く必要があります。 (※単に方向が正しいだけではなく動作範囲に注意してください) 2:特にT(スロットル)とE(エレベーター)確実に左側全域動くように動作範囲を確認してください。 3:コネクターはUSBを接続したままでは動作しません。必ずUSBを抜いて、一度再起動してから動作させてください。 ※コントロールモードスイッチをソフトウェアー上でテストしてスライダーがGPS、A、Mのそれぞれの位置にスイッチして青くなるように合っていない場合 仮にUSBを外してLEDが正しく点灯しているように見えても、モーターが動かない場合は、この設定が合っていないことを意味しています。 A7:TXキャリブレーションについて誤認されているケースが多発しています。 TXキャリブレーションはそれぞれのスティック動作に対して動きが正しくなければなりません 弊社マニュアル注意事項5ページと14ページの明記しておりますのでご参照の上、それぞれのスティック動作に対して 動きが正しいかどうか確認してください A8:TXキャリブレーションの方向は以下のようになっていることを確認してください ソフトウェアのトランスミッター較正では、 ・スロットル : 左にスライドさせると機体は下降し、右スライドでは上昇します。 ・ラダー : 左にスライドさせると機首は左を向き、右スライドでは右を向きます。 ・エレベーター: 左にスライドさせると機体はバックし、右スライドでは前進します。 ・エルロン : 左にスライドさせると機体は左に傾き、右スライドでは右に傾きます。 ※この関係は実際に動かして確認してもよいですが 設定の段階では動かして確認しなければならないということではありません 例えばスロットルについては 上昇する=スロットルスティックを上に動かすという意味 下降する=スロットルを下に動かすという意味です この時のスロットルスティックの動きでソフトウェアー上のスライダーがどのように動いているかを確認します 最後には中央のニュートラルにして 全部のスライダーが設定後中央に揃った状態でFinishボタンを押します A:もしNAZA-MV2の場合では別にQ62を記載しておりますのでそちらをご参照ください Qdj10:WOOKONG-Mの電圧設定が全くできない A:付属BECの接続が間違っています Qdj11:NAZAのモーター1個が逆の動きになる。設定は全て正しくし、接続は正しいはずである。 A:システム上ではモーターを逆に動かしません。モーターとESCの接続が間違っています Qdj12:NAZAの組立設定等を全て終わらせてホバリング中、ラダーを操作すると、ひっくり返る A:1番3番2番4番等のそれぞれのモーター等の動きが正しいか確認し次にそれぞれの接続が正しいか確認してください ひっくり返る時の問題は、離陸しようとするとひっくりかえる場合、回転方向が異なっている等があり、ホバリング中の場合 回転方向は正しい接続だが対象番号が違うものを接続している等がありますので確認してください Qdj13:WOOKONG-Mを通常通り何度かとばしており、設定再確認の為友人のPCで設定確認後、なぜかモーターが動かなくなった A:正確な原因は不明ですが、ファームウェアーとソフトのバージョンの相違の間で何か障害がでた可能性があります。 念のため、アシスタントソフトウェアーを起動し、上のTOOLから本体側のファームウェアーのアップデートを行なってください アップデートは、どのPCでも利用可能です。 Qdj14:NAZAのMC(またはVC)をUSBで接続してもPCで認識しない。(またはPC内でエラーが出る) A:接続して即認識しない場合があります。PCの仕様や環境などにもよりますがタイムラグがある場合があります。 また、接続する際にPCのCPU利用状況等によっても遅延やエラーが出ることがあります。 その場合は、何度か接続してテストしてください。 何度か行う内に通常利用できることを確認していただけます。 ※ただし、何ども接続するタイミングをあまり早くしてしまうとPC側で何らかのエラーが助長される可能性があるので PCの認識状態の様子をみながら行なってください。(時間を置いて認識しない場合外してもう一度) また、PCのUSBのポートを変えてみるのも手です。 A2:ドライバーが正しくインストールされていません。 ドライバーをダウンロードの為にクリックした時に”開く”を選択してもインストールされません。 必ず一度保存をします。 そしてそのファイルを解凍します。 解凍した後、中のファイルを指定して開きます。 この手順で行うことで正しくインストール出来ます。 OS等によって多少異なりますが、認識しない場合の多くはこのケースです。 Qdj15:NAZAをPCに接続するとPMUErrorが出る A:ソフトウェアー上に出るエラーは、上のABOUTをクリックすると 「Erroe Code」がありますので そこをクリックしていただくと、Erroe Code一覧が出ます。 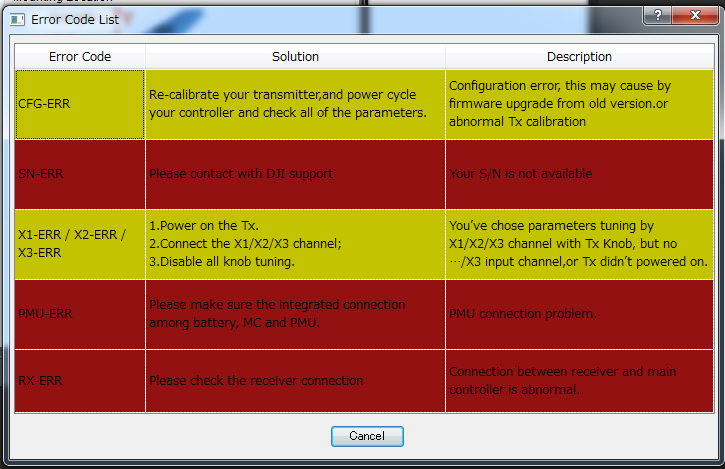 上から4段面のことろに記載があります。同じ記載のエラーか確認してください。同じエラー表記でしたら 表記は、PMU接続エラーです。 何らかの接続ミスか接続問題があります。 バッテリー、MCおよびPMU間の接続を特に注意して確認してください Qdj16:NAZAにGPSをつけないとエラーが出たり使えなかったりしますか? A:NAZAのGPSは初販売品にも利用出来ます。 また、NAZAは単独で利用できるものですので、ソフトやファームウェアーを新しくしても それが原因でエラーが出ることはありません。 現在もしエラー出ている場合は、ソフト上の帯にあるABOUTをクリックすると 「Erroe Code」がありますので そこをクリックしていただくと、Erroe Code一覧が出ます。その一覧によって確認してください。 Qdj17:NAZAの書き込みができない。 A:PCとMC関係の設定時、設定画面で[MC Output On]が赤く点滅している場合 MCとアンプの接続を一度外し、[MC Output On]が緑に変わることを確認してから実行してみてください。 マニュアルの各注意事項も合わせて御確認ください Qdj18:NAZAのアシスタントソフトウェアー上に「IMU-OFF」の表記がされており正常に書き込みができない。 A:NAZAの場合IMUは本体内に内蔵しており、IMU-OFFの場合何らかの関係で電源が入っていません。 IMUをONにするには、内部にて直接対処する必要があるため修理等が必要です。 お客様側で対処ができないものの為、販売店または弊社販売品の場合弊社へご連絡ください Qdj19:Wookomg-M(またはNAZA)S/N番号はどこに記載していますか? A:ソフトウェアー上のABOUTをクリックしていただくと infoがありますのでそれをさらにクリックしていただくと 本体の情報が表示されます。 中央付近に記載がありますのでご参照ください。 Qdj20:NAZA(または、WOOKONG-M)のソフトをインストールして正しいドライバーをダウンロードしているが本体認識しない A:ドライバーが正しくインストールされていません。 まず手持ちのOSに合った64bitか32bitを選択してダウンロードしていただきますが、一度保存してから”Setup”を開いてください。 もし開けない場合は、解凍するためのソフトがお持ちのPCに入っていない可能性があります。 その場合はネット上から表示されている解凍形式のフリーソフト等をインストールし、解凍して開いてください。 例:winRARなど Qdj21:NAZA(またはWOOKONG-M)ソフトウェアーは、OSWin Vistaで利用出来ますか? A:利用可能です Qdj22:NAZA(またはWOOKONG-M)で送信機の設定はヘリモード?飛行機モード?どちらで利用可能ですか? A:設定は飛行機モードを利用してください Qdj23:WOOKONG-M(WOOKONG-H・NAZA共通)ソフトウェアー等をパソコンにインストールしていますが、最初の登録ができません。 DJIからメール等も届いていますがここから進めることができません。原因がわからないのでどの手順が悪いか確認することができません。 A:もしインターネット回線でケーブルテレビの回線を利用されている場合、この回線では、ソフトウェアー上等でのDJIとの交信時、自動的に ブロックしてしまっているかつながらない状態になっている場合があります。またリンク表示やHTMLの関係上受信メールがうまく表示されていない場合 も考えられます。ネット回線を一般的な別の回線やメールアドレスを取得して実施してみてください。 Qdj24:NAZAのソフトウェアー上に「LOW-VOL4」のエラー表示されており、電圧設定やキャリブレーションで正しく設定しても消えない 他のNAZAを購入してテストすると正常でした。したがって故障か不良だと思うが・・? A1:このエラーは通常電圧に何らかの異常が認められる場合に表示されます。LEDの表示が電圧低下の表示をしている場合は バッテリーのセル電圧がズレているかバッテリーに異常が認められるケースがほとんどです。 まずはバッテリーを新品で満充電のものに交換して電圧キャリブレーションで正しいセル数に設定してください。 その他 ファームウェアーエラーの影響の可能性がございます。 これらはソフトウェアー上のTOOLからアップデートを行なってください。 ファームウェアー等のアップデートも行うことで解決します。 A2:上記のようにアップデートをおこなっても解決しないというケースでは BECの接続が間違っている可能性があります。 NAZAに付いている専用BECを受信機に接続すると動作はしますが、電圧管理ができなくなります。 必ずX3に接続している事を確認してください。 Qdj25:NAZAのアップデートがうまくいかない。ソフト上でアップデートが終わると”Please power cycle controller”と表示された後、MCが反応しない A:アップデート作業を終了したり中断したり成功しても、必ず”Please power cycle controller”という表示がされます。 その後MCの電源を強制的にカットしますので反応がなくなります。 USBを外してもMCの電源は切れていますので、MCに接続されているバッテリー電源を抜き差しして再起動してください。 これはアップデートの作業をすると必ず行わなければならない再起動ですので不良や故障ではありません。 Qdj26:NAZA(WOOKONG-M)でTOOL内のエラーコードを確認すると5種類も問題が表示されています。どうやって解決しますか? A:それはエラーコード一覧(ヘルプ)で現在のエラーを表示しているのではありません。 また設定されていていも以下のように表示されたままです エラーが表示されるのは上記の一覧ではなくソフトウェアーの下の帯のところです 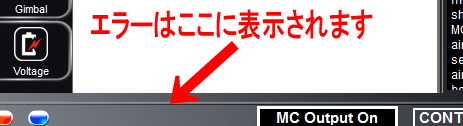 Qdj27:NAZA(WOOKONG-M)のソフトウェアー上でコントロールモードスイッチを切り替えても、GPS、A、Mの切り替えをおこなっても青くならない。 A:送信機側のエンドポイントやサブトリム(表面のトリムボタンではありません)等を利用して調整してください Qdj28:NAZA(WOOKONG-M)ソフトウェアー上のオートパイロットについて。Pich、Roll、Yaw、Verticalについての意味がわからない A:この部分は日本語マニュアル16ページに記載箇所になります。Pichは、前後に対応する意味でエレベーター側の意味です Rollは左右の傾きでエルロン、Yawは軸回転でラダーに該当します。Verticalは垂直方向で上下の動きです。 Qdj29:NAZA-Mのゴーホーム等で着地をすると地面でバウンドするので改善したい A:ソフトウェアー上のオートパイロットについてVertical上下についての感度を下げてみてください 現在のバッテリー重量や総重量によってジャイロの感度が見合っていない可能性があります。 感度が高いと着地の僅かな衝撃がジャイロに反応していますので感度を下げるのが効果的です しかし多少はランディングに振動するものですので バウンドはしてしまいます。ある程度の妥協点を見つけて設定してください。 もしくはスイッチでゴーホームした時、完全に止まる前に着地した時点でスイッチをATTIモードに戻すとよいです。 Qdj30:NAZA-F550で正しく接続と組立設定をしました。ラダーが流れる(ドリフト)がなぜ? A:ソフトウェアー上のオートパイロットについてYawの感度について調整してください この部分はラダー感度調整になりますので、この調整で変化します。
Qdj31:NAZA(WOOKNG-M)はヘリモードで利用出来ますか? 類似原因質問:ピッチ側に時々ぴくつく、スロットルを上げると突然モーターが回転が高回転になる。 A:ヘリモードでは利用できません。MIX等が送信機で入ってしまうので必ず飛行機モードで設定を行なってください。 もし、送信機をヘリモード設定で利用すると、急激に上昇してコマンドスティックをして墜落して止まらせる等のことがおきます。 送信機の初期設定状態等によっては、モーターの回転状況等にも問題が生じる場合があります。 Qdj32:エンジンヘリにWOOKNG-Hを設置して、設定がすべて終わったが、マニュアル記載の4.8V2000mAHのバッテリーを利用し、満充電なのに低電圧のLED表示になる。 A:日本語マニュアル10頁記載の注意事項をご参照ください。 最大で5WほどWOOKONG-Hは利用しますので、利用サーボや受信機等全てのメカを利用した時に余裕のあるバッテリーを選択していただく必要があります。今の時点で低電圧のLED表示になっている場合は、トータル容量で不足していることになります。仮にサーボを全てMCから抜いて純粋にMCへの電源だけに利用してLEDを確認してみてください。ここで低電圧のLED表示がなくなれば、単に電力不足ということになります。 可能な限り現在利用されている組み合わせで最大限のバッテリーを搭載してください。 ※エンジン用に利用する場合でも、バッテリー種類としてはニッカドバッテリーは出力が小さいので安定しません。リポバッテリーをご利用いただくことをおすすめ致します。 Qdj33:NAZAをクアドコプターに設置して離陸直前にいきなりバックドロップした。設定や接続に間違いがないのになぜ? A:NAZAの設置向きが間違っています。特に前後の向きをマニュアルで確認してください Qdji34:曇りの日に、NAZA-M(GPS)(WOOKONG-M)搭載のF450を飛ばしました。雨は降っていませんがGPSモードにすると不安定で前進したり、ゴーホームにするとぐるぐる周辺を回る。 A1:もし墜落した後の場合は故障している可能性がありますのでその場合は交換が必要です。 その他 天候が悪いためGPSが良好に働いていない可能性があります。GPSは大気中の水蒸気の量によって電波到達時間が遅くなり捕捉性能が低くなります。この遅延を利用した気象研究もあるようですので、遅れ等があるという事実は実際にございます。 天候の良い時に、最初のGPS機能テストをお試し下さい。 テスト手順としましては、まず電源を入れたあと、本体を動かさずにそのままにしておきます。1分位動かさずにいると、緑に1秒程度点滅します。ホームポイントの記録がなされていますが、このあとに離陸してテストすると良いです。 この時、ATTIモードでホバリングしてから、その地点でGPSモードに入れてください。ここでGPSモードでぐるぐる回ったり前方に勝手に動く場合は 一度ATTIモードで軽くフライトしてATTIモードで気圧などを十分に解析出来たところ(ホバリングが安定したところ)で再度GPSモードに入れます。 ここで安定して定点ホバリングできれていれば、ゴーホームなども設定してあればスムーズに機能すると思われます。 もし晴天時でも同様の問題の動きが見られた場合は、アンテナの精度不良の可能性がございますので販売店にご相談ください。 通常は霧や曇りでも機能しますが、程度がございますのでご不明な場合もご相談ください。 各確認後にはソフトウェアーにてファームウェアーの更新をオンラインにて行ってください各種データー修正がされる場合があります。 A2:GPSコンパスキャリブレーションが失敗している可能性があります。 コンパスキャリブレーションが失敗している場合は、GPSモードで定点ホバリングが出来ず GPSスイッチに入れたとたんに傾いて走り出したり、ゴーホームで旋回し始めたりするような症状になります。 GPSコンパスキャリブレーションをを正しく行うには、マニュアルモードからGPSモードの間を6?10回程度スイッチしますが最後に マニュアルモードにした状態でそれぞれのキャリブレーションを行うとLEDは消灯します。 ※ただし消灯後すぐにGPSの衛生キャッチ状態を示して赤い点滅がゆっくりになる場合がありますのでそれとは区別して理解してください。 よくあるケースでは屋内のパソコン等があるような環境だと赤いLEDが点滅しており失敗しているケースがあります。 失敗したままフライトするとGPSが安定せずよいパフォーマンスが得られない状態になっていますので 失敗の可能性がある場合はもう一度キャリブレーションを行ってみてください A3:ゴーホームの場合でかどうかを問わず、大きく旋回するような状態になりましたら、GPSの調整してください。もし時計回り(右回り)だったら、GPSの矢印は左へ3度から10度ぐらい移動します。もし反時計回り(左回り)だったら、GPSの矢印は右へ3度から10度ぐらい移動します ※最大15度までですのでそれ以上行っても効果がありません。 また、アンテナ架台はこれらの調整の為回ってしまわないように固定されるようにしてください ※気温が非常に低い時にはよいパフォーマンスが得られない可能性があります。 以下画像を一度デスクトップに移動させて(マウスの右クリックで名前を付けて保存でも良いです) Jpegファイルを開いて印刷して分度器代わりに利用してください 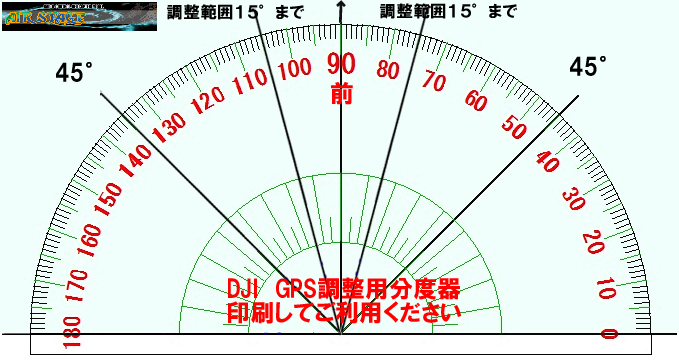 Qdj35:F550+WOOKONG-Mに11.1V3300mAhを利用してフライトした。F450のNAZAセットも持っているが、どうも同じような安定感がない。 A:重量やプロペラサイズ等多数が関係しているかもしれません。今もし10インチプロペラを付けられている場合、8インチに変更してみてください。 8インチを利用することで、バランスが取れて安定する場合があります。 その際、テールが少し流れるように感じる場合がありますので感度を変えてみてください。(Qdj30をご参照ください) ちょうどヘリでいうとピッチを下げた(マイナス気味にした)ような状態になっています。 Qdj36:WOOKONG-Hで設定後どうしてもGPSやATTIにするとスワッシュプレートの動きが不自然になる。突然モーターが回ったりした。 類似質問:NAZA-Hの設定が終わりフライトテストでGPSモードに入れたところ急激に上昇した。すぐにマニュアルモードにしてホバリングを再度開始したがGPSモードに入れたところ急激に降下して墜落した。マニュアルモードは正常に利用出来るがなぜこのようになる? A1:フライトモードは、一般的には送信機右上のフライトモードスイッチを利用しますが、多くの方はこのWKHを搭載するときに、モード切り替えもこのフライトモードスイッチを利用します。その際、以前の通常フライトしていたデーターをコピーして利用されています。 フライトモードスイッチとモード切り替えスイッチを別にしない限り その際に、ピッチカーブやスロットルカーブをそのままスタントモードのまま送信機の設定がなされているケースがあります。 GPSやATTIモードは安定させる動きをするカーブ等にしてある必要がありますのでスタントの為のカーブでは動きに問題が生じます。 最初の設定はノーマルモードと全て同じにした状態で設定を行ってください。 A2:ATTIやGPSモードにすると急激に下降して墜落しそうになったなどのケースでは ノーマルモードで問題が内にも関わらずATTIモードやGPSモードにした時だけどうしても問題が出るというようなものです。 基本A1の回答を行っていただけば治りますが、見落とししている箇所があるケースが実際にありました。 ノーマルモードの時とATTIモードとGPSモードの時のスワッシュの動きを逆にできる設定の送信機を利用している場合で各モードのスワッシュの動きが違っていたというケースがあります。 具体的には、ピッチを動かした時ですが、上昇する時のようにピッチを動かす場合(スロットルを上げる場合)、ノーマルモードで たとえばスワッシュプレートが上に動いたとします。(上か下かは機体により、送信機の設定によります) ATTIモードやGPSモードで、スロットルを上げると、スワッシュが逆に下に動いてマイナスピッチになっていたというケースがありました。 この場合は送信機の設定の問題ですが、ノーマルと同じにしているはずと思い込んでしまい原因不明に陥っていたケースです。 あくまでATTIやGPSモードは、ホバリング安定を取るためのものなので、送信機自体はノーマルと同じ状態に設定するのが基本です。 このようなケースの場合は同じはずと考えられているので気が付くまでに時間がかかっています。もし同じだと考えられていても 違う可能性があると考えて今一度設定を確認してください。 Qdj37:NAZA(WOOKONG-M)で電源を切ったときのゴーホームとしてのフェールセーフは設定画面で見ることができるのでしょうか。 電源を切ってはたして戻ってくるのか心配です。 A:以下に参考事項を記載いたします。必要に応じてご参考ください まずオートパイロットの2番で初期値はLandingに設定されていますのでGo-homeLandingに設定してください。 ここはフェールセーフのときの動作を決定します。 次にTXcalibrationを見てください。コントロールモードスイッチでGPS、A、Mについてスイッチで切り替えられると思います。 最初のコンパスキャリブレーション(マニュアルご参照)はこの3個の位置に移動する必要がありますが 終了した後はほとんどマニュアルモードを実質利用しないと思います。 そこでここのMをフェールセーフに合わせられるようにエンドポイントを設定して移動してしまいましょう。 スイッチを切り替えるとGPS、A、フェールセーフというスイッチの移動になるように確認してください。 そこでフライト中にフェールセーフ側にスイッチを移動するとゴーホームするという事になりますが、 電源を切ったときのフェールセーフは送受信機側で設定していなければなりません。 ご利用の送受信機のマニュアルをご参照いただきますが、コントロールモードをフェールセーフの状態で保存していただくと 送信機の電源を切った時、画面上でフェールセーフの位置にスライダーが移動する事を目視できます。 実動作確認の場合どこか遠くへ行ってからゴーホームにするよりもホームポイントの保存ができたら その離陸したその場でゴーホームを行ってみてください。(できればスイッチでできるように設定してください) それを行うことでその場で20m上昇し約15秒ホバリングした後降下してきます この方法での確認が一番近い距離で行うことができ、万が一の場合でもスイッチを直ぐにATTIモードに戻せばよいので 回収もしやすいと思われます。この方法は参考として御留意ください。 Qdj38:NAZAのアップデートしようとしたが、途中で”the network is abnormal,check the network status.”という文字がでて中断されてしまう。 WOOKONG-M等は利用できるので実質的なネットワーク問題が感じられない。なぜ? A:ほとんどの場合は、実際にネットワーク上に問題があります。各ブラウザを閉じて、PCが快適に動作する状態で行っていただきます。 また、ルーターのキャッシュに問題が出ている場合がありますのでリセットをするか、ルーターの電源を入切すると解決する場合があります。 その他、ソフトウェアー上の上の帯のところにVersion not muchの記載があるかと思います。その場合は、バージョンが異なっており何らかの原因でネットワーク障害が起きている可能性があります。ソフトウェアーの最新の新しいバージョンをご確認いただき、もし、新しいバージョンがリリースされている場合は 新しいバージョンをダウンロードしていただき、動作確認をしていただいた後に古いバージョンをコントロールパネルからアンインストールしてください。 また、 最初にID等の確認画面である部分でソフト上のABOUT→infoにあるS/Nコードを確認してください 現在のMCのコードが表示されていますので、それをコピーして入力画面にペーストし、エンターを押してください。 アップデートの際にはこの部分も必要になります。 Qdj39:NAZAのアップデートを行った後、完了したので、電源を入れ直すとGFC-ERR{3}がでた。なにか問題ですか? A:初回アップデートの指示がでてアップデートを行い電源を入れ直すと多くの場合このエラーが出ることがあります。 再度電源を入れ直すと解決します。 Qdj40:Z15の設定等が全て終了した前方を向かないがなぜか? A:フライト中送信機によって制御してみてください。フライト中の制御によって修正される可能性があります。 それでも解決しない場合一度WKM及びZ15のファームウェアーを更新し、起動した時に送信機トリムで動作調整してみてください。 その後もしFPVを利用されている場合は、一度FPVシステムを外してください干渉している可能性があります。 類似質問:Z15の初期設定終了後ニュートラルが合わず、リセット後にもズレて動いたりします。 A:FPVモードで操作してみてください。 それから 初期設定等を全てマニュアル通りに行っていただき、その後にマニュアル記載の”テスト”のところで 初期状態が前を向いていない等の場合は、一度フライトさせることで最終的な調整が取れます。 ソフトウェアー上でもズレがないか等を確認してみてください ※トリムボタン等では調整しないでください また、ファームウェアーも更新してみてください Qdj41:NAZAで送受信機のバインドを行ったあと、ホームポイントの緑にLEDが点滅するまで待っていたが、いつまでも点滅しないなぜ? A:ソフトウェアーのAutoPilotの中の3.intelligent Orientation Control のチェックマークにチェックが入っているか確認してください。 また、このX2のところに送信機のスイッチが割り当てられていて コントロールできるかソフトウェアー上で確認してみてください。 Qdj42:NAZA+F450(WKM)で飛ばしているが高度が安定しないように感じる。スロットルの動きがついてこないように感じる (スロットルを少し動かすと急降下など) A:日本語マニュアルのオートパイロットベーシックパラメーターの項目をご参照ください この部分でバーチカルゲインとスロットルの関係が記載されています ここをご参照のうえ今一度周辺の注意事項を合わせてご一読のうえ再設定を行ってみてください 念の為ソフトウェアーとファームウェアーの更新、TXキャリブレーションが全域動く確認と設定等行ってください。 その他アティテュードゲインも合わせてマニュアルにて確認していただき調整の対象としてください WKMの場合はマニュアルの45ページ(推奨設定)をご参照いただき初期設定を行ってください Qdj43:WKMのATTIモードで横に流れる調整しても治らない。しかしGPSでは定点ホバリング出来るどうにかならないか A:ATTIモードで多少は流れることがあります。 流れるのでGPSモードがあります。 これ自体はある程度のところまでしか調整等が出来ず それ以上の定点ホバリングではGPSモードを利用してください. その他、機体の電源を入れるとき、極力水平状態で電源を入れてください ホバリングした時に傾いて流れる等の時、水平状態で電源を入れ直すと治る場合があります。 その後、一度クルージングを行なってから ホバリングをして様子を見ると治っている場合があります。 もし流れ方が極端な場合はソフトウェアー左上のTOOLからIMUキャリブレーションを行ってください。 正しく完了すればよい結果がある場合があります。 Qdj44:NAZA-Hでスロットルが逆になる。他のスライダーと逆になるがこれでよいのか A:TXキャリブレーション サブトリム等の全ての終了点を0にしていただくことと 操作範囲はデフォルト値で100になっていることを確認してください STARTボタンをクリックして、次に、スライダーがトラベル範囲の全体にわたって TXスティックをすべて数回移動させてください。 一旦上記の手続きが完了していれば、FINISHボタンをクリックしてください。 (重要) TXのピッチトラベルを変更する場合は、上記のキャリブレーションをやり直してください。 これらが主体となるので送信機でリバースすることは問題ありません。 スロットルに関しては送信機側のリバースで実動作に合わせてください。 Qdj45:NAZA-Hのテールのジャイロ反応やスティック反応が全くないなぜ? A:まずはNAZA-Hを通さずにテールサーボが動作するか確認してください その後ソフトウェアー設定時にテールサーボ設定の際、設定時やフィードバック等が行うことが出来るかどうか確認してくください NAZA-Hを通さずに動かない場合はサーボの問題です Qdj46:NAZA-Hでホバリングがとても安定しているが、地上でATTIモード(ATTI、GPSATTI)に入れるとスワッシュプレートが右に傾く本当に大丈夫か A:以下の画面を見てください 4番の記載にATTIモードを地上でテストした時スワッシュプレートは右に傾くとなっております。 これは異常ではありません 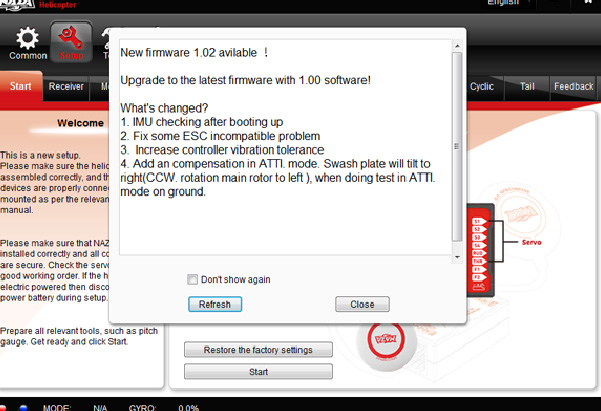 Qdj47: Z15で上を向けたときか下を向けた時、映像が途切れるのはなぜ? A:映像が途切れてからLEDは赤色を示している場合、HDMIの接続が不完全の可能性があります。再接続を行ってください。 接続の際にはシリコンオイル等をポート内にかけて十分な接続を試みてください。 もしLEDが緑を示している場合は別の原因の可能性があります。 Qdj48:WOOKONG-Mで緑緑紫紫というLEDの光方をしている。マニュアルにも載っていないのですがGPSロックも不自然なので安定しない場合にこの表示になりますか? A:この表示はコースロックの表示です。 動きが不自然なのはコースロックした状態でGPSモードで動作させてイメージと違う動きになったためと思われます。 コースロックをまずはOFFにして動作させてください その他、GPSは必ず架台等を利用してMCや受信機から離し、機体の高い位置に設置してください。 低い位置やフレームやアームに固定すると性能を発揮せず機能が十分に引き出すことができませんので御留意ください。 Qdj49:Wookong-MとS800で全て設定を行ってから定点ホバリングを行ってみると、時折白いLEDが2?3回頻繁に起こりバランスを崩します。 もう一つのWKMに交換すると正常だった。WKMの不良だと思う。 A:このLEDが出た場合はマニュアルのLED早見表で確認していただくと姿勢不安定となっております。 これはIMUの取り付け状態が良くないことを意味しています。 通常通りと付けられている可能性があるのですがここはまず、IMUを一般のヘリコプタージャイロと同じように取り付けしてみてください。 姿勢不良であることを表示した時に不安定になるということは状態を正しく認識しているので まずはIMUへの振動対策と取り付け姿勢に対して対策してみてください  Qdj50:NAZA-MとF450の組み合わせでホバリングしてGPSに入れると流れる。屋内でホバリングテストすると、少してボボボ・・という異音がして急激に上下が不安定になった。 A:もし、屋内でこのような音が聞こえた場合は、プロペラが何らかの関係でねじれている等良好な状態にないことを意味しています。 屋外でこのような音が聞こえないケースがあるので混乱されるケースが多くあります。 このねじれなどが起きたようになり、プロペラ振動が発生した状態で回転している音の可能性があるので、 まずはプロペラを交換するかカーボンプロペラ等少し硬質な素材のものに交換しておきにくくなるようにしてみてください。 このようなケースの場合は、MCを交換したり、GPSを交換しても変化がなくプロペラを変えると改善する可能性があります。 類似した症状で場合によっては ボルテックス・リング・ステート(セット・リング・ウィズパワー)か似た状態にに陥る場合もありますのでご参考ください。 ※低空を低速でホバリング時起きやすい条件があります 対処:少し前進して揚力を得る等がありますが状況を正確に判断することは難しい場合がありますので これらは、あくまで予備知識としてご参照ください。 以下実機ヘリでの現象参考動画です。 https://www.youtube.com/watch?v=RXk-uaxCETc Qdj51:NAZA-Hで全て接続してドライバーも認識できるようにした。しかし、TXキャリブレーション等が全く利用できない。動作しないので設定できない。 A:現在セットされているファームウェアーが今ダウンロードされているソフトウェアーで対応できていない可能性があります。ソフトウェアー内でオンラインアップデートを行うと一致して利用できるようになりますので、まずはファームウェアーのアップデートを行ってください Qdj52:Z15で動きが小刻みに動きスムーズに動かない。それはなぜか A:Z15のファームウェアーを更新してください。オンラインアップデートを行うと治ります Qdj53:IOSDの情報が入ってこない。 A:まず最初に接続しているWKMのファームウェアーを最新のものに更新してください。 それでテストを行ってください。 それでも情報が入ってこない場合は ハンダでカメラを接続しなければなりませんので一度テストしてください。 その他接続が間違えている場合があります SAOの配線をIOSDからカメラ等に接続しなければなりませんが受信機に接続しているケースがあります (マーク2はSAO内蔵で必要ありません) メーカーWikiがございます。 以下URL内のトラブルシューティングご参照ください https://wiki.dji-innovations.com/en/index.php/IOSD Qdj53:F550+NAZA-Mの設定が全て終わりホバリングしていたところ急に上昇してすぐにスロットルを下げたのにすぐに降りてこなかった A:まず送信機が飛行機モードになっていてヘリモードではないことを確認してください 利用されるバッテリーが4セルの場合は8インチプロペラを利用し、3セルで利用される場合は10インチを利用してください。 もし4セルを利用しているのに10インチを利用した場合、似たような症状になる場合があります。 (2014.3追記) この内容で記載の10インチとは、昔の設計の8インチが大きくなっただけの形状のような10インチのことで 紡錘状のもの(スローフライヤーペラといいます)を意味しています。※1038のペラはスローフライヤー用ではありません 厳密にはプロペラ形状によって10インチ利用できますが正確に理解できるようになるまで原則のとおりされるのがよいです この意味は、バッテリーセルが3セルか4セルかによって同じスロットル開度でもモーターの速度が変わり、 簡単に一部だけをみるとプロペラが浮力のあるものかないものかで 大きく状況が変わります。高回転型の1038は浮力がスローフライヤーペラよりありません。しかし8インチよりあります。 スローフライヤーペラの場合 低回転の場合は回転抵抗が出るので不安定になることもありますし、浮力とのバランス調整が出力で崩されている場合もありますので この原則があります。これはモーターメーカーによっては箱にも記載されている内容です。 つまり、1038はこれらの原則の概念より後に設計されており、1038をここでいう10インチとする場合、 それを利用してはダメということではありません。厳密にいうと設計によります。 8インチよりは上記の内容が多少影響が出る可能性がありますので上下に安定しなくなるなどの問題が出たときは これも留意して対処すると改善することがあるので参考になるかと思います。 Qdj54:2012.12月購入のWKMでゴーホームだけ不安定。 通常クルージングやフライトでマニュアル・ATTI・GPSはとても安定しているが解決方法は? A:様々な方法を行って解決しない場合は以下を行ってみてください。 もし、通常通り安定フライトできているWKMを別にお持ちかご友人の方でお持ちの場合は そのファームウェアーが利用出来るものと同じソフトウェアーを利用して設定してください。 その際、正常なWKMから一度設定データーをエクスポートしてそのデーターを問題のWKMにインポートします。 それで中の設定自体はご自身の機体に合わせて設定してください。 もし、そのようなデーター入手が難しい場合は以下行ってください。 WKMはまず、1.36バージョンにアップグレードしてください https://wiki.dji-innovations.com/en/index.php/WooKong-M_Release_History 次はアシスタントソフトの中の、TOOLでデーターインポートのボタンを押して、 以下のアドレスのものをインポートしてください。 https://www.yousendit.com/download/UVJqRFFWUnJtUUhOUjhUQw
このデーターはクアッドコプターの特定のデーターが入っていますが インポートした後はご自身の機体に合わせてデーターを修正やキャリブレーション等してください。 ※必ず設定チェックと設定修正を行ってください この内容は2013.3現在の解決方法です。 もし上記の物ができない場合や解決しない場合、 一旦販売店にお尋ねください A2:MCのX3ポート利用についてソフトウェアー上で重複がないか確認してください お付けしている日本語マニュアルに「重要」と記載されている内容を、今一度ご一読ください。 現状ではWKMのX3ポート利用の重複があるかもしれません。 ゴーホームスイッチ(X3)とジンバルピッチコントロール(X3)が重複している可能性があります。 もしこの状態でゴーホームすれば振動やハンチングのような症状がゴーホーム時に発生します。 もし、ゴーホームスイッチ(X3)を利用される場合は、ジンバル設定はOFFにして デフォルト(初期値)ボタンを押して何も入力しないでください。 この場合はWKMを利用したジンバル操作はできません。 もし、WKMのX3ポートでジンバル操作をする場合、ゴーホームスイッチは利用できませんので ソフトウェアーオートパイロットのチェックマークを外してください。 この場合のゴーホームはUチャンネルのフェールセーフを利用してゴーホームするようにしてください。 A3:具体的な原因不明ですがWKMでジンバル数値が関係している場合があります。 入力される際、Center数値を大きく0からはなれた数値を入力せずに出来るだけ0?70くらいに抑えて入力して センター自体はサーボホーン等で調整するようにしてください。 仮に500や850等の数値を入力するとゴーホームの機能が働いた時、急激に暴れるような動きの症状が出る可能性があります。 数値入力は低い数値で出来るだけ0数値をいれるように行ってください Qdj55:NAZAでクアッドコプターを組み立てた。離陸する時、左方向にドリフトする。 マニュアルではトリム調整をすればなんとか離陸出来るがATTIモードでは全く離陸出来る状態ではない。 他にNAZAを持っているが問題ないのでこれは不良ではないか。 A:まず、どんな状態であっても、送信機のスティック4方向については トリムボタンやサブトリムを調整せずに、ニュートラルで設定してください。 もし、ニュートラルで設定してもこのようなドリフトがある場合は、最初にソフトウェアーのTOOLから ファームウェアーの更新、次にIMUキャリブレーションを行ってください。その際機体を動かしてはいけません。 ドリフトだけでしたら上記のようにIMUキャリブレーションで修復できます。 Qdj56:WKMやNAZA-Mの推奨感度設定数値をおしえてください A:以下の表をご参照ください  Qdj:57:IOSDの情報表示部分がかけて表示されている。カメラの映像は問題ない。なぜか? A:まずIOSDのソフトウェアーをメーカーサイトからダウンロードしてください WKMと同じように行いますがパソコンによって開きにくい場合がありますのでZipファイルをデスクトップに保存してそこで 解凍してください。 さらにソフトウェアーをひらいたらパソコンと接続してIOSDのファームウェアー更新準備をします。 Infoからファームウェアー数値情報をクリックして更新を行います 更新すると修復できます Qdj58:NAZA-MV2(V1)のファームウェアー3.12にオンライン更新したがスロットルが50%まで上げないとモーターの回転が上がらなくて離陸しない A:スロットルスプリングがついているもので中間位置にする送信機などにも対応しており、初心者などが手を離したときに中間位置に戻る意味の保護機能です。これは仕様ですので異常ではありません。 実際に離陸してフライトした後はあまり不便を感じないフィーリングと思われます。 Qdj59:NAZA-MV2(V1)のファームウェアー3.12にオンライン更新したがスタンバイ出来るまで時間がかかる A:これは仕様で異常ではありません。マニュアルにも記載しておりますがウォームアップでセンサー(内部センサー全般)温度の予熱の為時間がかかっています。 これは特性上個体や時期によっては時間に差がでるかもしれません。これはユーザーを守る為のもので異常ではありません。 ※長時間かかるという場合のケースを改善するために2013.8以降に新しいソフトウェアーとファームウェアーがリリースされましたので こちらに更新して行ってください Qdj60:NAZAMV2をソフトウェアー設定中”RC”のタグのところで、コントロールスイッチ選択でGPSが消えている。なぜ? PMUはGPSを認識していて緑LEDがついている。 A:一度電源を入れ直してください Qdj61:NAZAMV2をソフトウェアー設定中”IOC”のタグのところで、チェックマークを付けるがスイッチできない。スライダーが動かない A:一度電源を入れ直すか、GPSキャリブレーションだけ(屋外で)最初に行ってください。 GPSキャリブレーションを行うように指示がでてエラーが出ていることがあります。しかし、電源を入れなおすと設定出来る場合があります。 まずは全て設定してGPSキャリブレーションも行ってください。念の為全て完了した後 再度ソフトウェアーで設定確認をおすすめします。 |
![]()