
トラブルシューティング (FAQ)DJI-2 - ドローン総合事業|販売|DJI|INSTA360|CHASING|FRSKY|BETAFPV日本正規代理 AIRSTAGE (エアステージ)
カテゴリー
-






 DJI 産業用 ドローン (測量・空撮)
DJI 産業用 ドローン (測量・空撮)
- 産業用【本体】
- 産業用【部品】
- DJI Matrice 4シリーズ 部品
- DJI Dock 3(Matrice 4D)部品
- DJI Dock 2 部品
- FlyCart 100 部品
- FlyCart 30 部品
- DJI Mavic 3 Enterpriseシリーズ 部品
- Matrice 30シリーズ 部品
- Matrice 400 部品
- Matrice 300 RTK 部品
- Matrice 350 RTK 部品
- Matrice 200 シリーズ 部品
- Matrice 600 部品
- Matrice 600PRO 部品
- Mavic 2 Enterprise Advanced 部品
- DJI Mavic 2 Enterprise 部品
- S1000Plemium 部品
- 産業用【カメラ・ジンバル】
- 産業用【SPオプション】(CZI)
- その他 アクセサリー
 DJI 農業用 ドローン(農薬散布)
DJI 農業用 ドローン(農薬散布)
 DJI RoboMaster
DJI RoboMaster















- - ツール・アクセサリー他
- - バイク用品・教習
- - ミニセグウェイ
- - 書籍(Books)
- - ラッピング資材
- - 事務用品
- - 期間限定商品
- - 予約販売品
- ◆ AIRSTAGEメンバーズ商品
- D
ベストセラー
-
01
- 今日から30日間の集計
- 新着情報ページ
WEB通販営業日
-
2026年7月 日 月 火 水 木 金 土 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31




 (一般通販禁止品・AIRSTAGEグループ窓口にて)◆DJI農業◆【注文後生産状況確認し請求書送付】")


(T70P)(一般通販禁止品・AIRSTAGEグループ窓口にて)◆DJI農業◆【注文後生産状況確認し請求書送付】")

(22.30.100.0014)")


")
![]()




トラブルシューティング (FAQ)DJI-2
Qdj62:NAZA-MV2の設定を全て行ってGPSキャリブレーションなどを行った。完全な設定まで行っているはずだがなぜかモーターが回らない。
A1:一度初めての設定の時にアップデート指示がでてファームウェアーの更新を行っている場合でも
もう一度ファームウェアーを更新してください。
ソフトウェアー上のupgradeのところを見るとファームウェアーの記載箇所にアップグレード可能なファームウェアー番号が記載されています
この文字をクリックしてからOKを押して更新を実行してください
全部のモーターが動かない場合は、上記の事か設定にて治る確立が非常に高いです。
A2:マニュアル26ページのFAQをご確認ください。IMUキャリブレーションが必要な場合があります。これは最初の動作確認時に必要なケースかもしれません。
例えばCSCを行ったあと、緑色のLEDが素早く点滅した。スロットルを上げてもモーターが回らない場合特に要注意です。
IMUキャリブレーションをソフトウェアー上でチェックして必要という表示が出ていないか確認します
BasicIMUキャリブレーション(機体は必ず水平状態で行ってください)を行い。もう一度チェックをしますがNo need と記載があればOKですので
モーターチェックを行ってください。
もしそれでも動かない場合は、AdvanceIMUキャリブレーションを行い終了したらもう一度BasicIMUキャリブレーションを行います
最後にチェックを行いNo needになっていることを確認します
いづれも機体は水平状態を保つ必要があります
詳しくはマニュアルをご参照ください
Qdj63:NAZA-Hでモード切り替えを行なってラダーが地面に接触しました、PCに接続したら、Other Err「25」と表示されました。
A:このエラーは、衝撃で内部センサーが定位置からずれてしまいました。修理が必要ですお求めの販売店にまずご相談ください
Qdj64:NAZA-MV2でERROR(27)がでた
A:GPSキャリブレーションエラーです。GPS以外の他の設定を全て行ったあとに屋外でGPSキャリブレーションを行ってから再度PCに接続して設定を再開してください
Qdj65:NAZA-MV2の電源を入れてからGPSの感度が悪いように思う。感度良好になるのに5?10分以上になるので飛ばせない。どうしたら良い?
A:今赤いLEDが3回点滅の場合は飛ばす事自体は可能です。可能な内容について整理してお考えいただく内容も合わせて記載いたします
(対策)
まずはアンテナ架台を出来るだけ長いものを利用して高い位置にGPSを設置してください。
機体から出来るだけ離すことで感度は変わります。
次にファームウェアーを一度更新していても、もう一度更新してください。
うまく以前に更新の時に入っていない場合でもシステムを綺麗にすることが出来る場合があります。
新しいファームウェアーがある場合は更新するのが良いです。
(整理事項)
フライト前のLEDで赤いシグナルでフライトを中止する必要のある内容は、常時赤い点滅、バッテリー低電圧での連続赤LED点滅です。
赤LEDの3回点滅、2回点滅.・1回点滅の場合は衛星のキャッチ状況を示しているだけですのでそれ自体は問題ありません。
フライトを中止の警告ではありません。
赤いシグナルが消えるまで飛ばせないという意味ではありませんので御留意ください。ゴーホームもできます。
ご心配な場合はまずは電源を入れます。
そのまま待ちます。
約1分程度以内に緑のフラッシュ(ホームポイントの記録)が感度の状況に関係なく複数点滅があります。
この後まずはホバリングしてGPS定点ホバリングします。
問題なければ、その場でゴーホームをします。
電源OFFではなく、切り替えスイッチでゴーホームできるようにしておけばなにかあってもすぐにATTIモードにできますので
そのようにしてください。
まずは上記対策等を行なっていただければ解決する可能性が高いと思われます
Qdj66:NAZA-H(NAZA-M)でS-BUS接続したが動作しない
A:送信機側の割り当てを確認してください
例:T14SGはリンケージメニュー>ファンクションでチャンネル割れ当て
他に事例として受信機側のS-BUS接続部分に問題があったケースがあります
受信機を交換して確認してみてください。
Qdj67:NAZA-MV2の墜落後、上下の動きが激しくなった故障したのか何か不具合がでたのか?
A:まずはPCに接続して各設定が全て正しくできているか確認してください
IMUキャリブレーションも正しく行えるか確認してください。
事例としてX2のコネクターが半抜けで正しく動作させることができなくなっていた為に、問題が起きていたということが報告されています
墜落後以外でも常にフライト前にはこれら配線が正しくしっかりと接続されているかどうかなども確認してフライトに望んでください。
Qdj68:NAZA-MV2のLEDはV1に利用できるか?
A:このテスト自体は実際にV1でLED利用を行わなければなりませんが、各種ユーザ報告ではバージョンアップして
利用出来る場合と利用出来ない場合があるようです。いづれも接続が同じですので、この違いについては
生産時期によって多少異なるかもしれませんのでメーカー確認中ではあります。
PMUをバージョンアップとしてV1に取り付けるには、従来のLED利用にはLED側にも電源ワイヤーを取り付ける必要があります。
この点からV1のLEDポートは電源がなく、、V-SENで電源を取る必要があることをが考えられますので
基本的には、LEDはV2用ではなく、従来品を利用してください。
弊社のPMUを購入いただいた場合は、接続マニュアルをお付けしておりますのでご参照ください。
Qdj69:NAZA-MやWKMの高度上下が安定しないので、気圧に問題があると感じてMCに穴を開けた。感度がよくなる?
A:このようなことは絶対に行わないでください。穴を開けても解決しません。センサーはそのような感知はしません。
上下に安定しないと感じた場合、NAZA-Mの場合はまずは、ファームウェアー更新の上、IMUキャリブレーションを行ってください
また、今よりプロペラを小さくしてモーターの回転数を上げてください。その他垂直軸のGAINの数値を変更して調整してください。
A2:NAZA-MV2では、X2のコネクターが少しだけ抜けていてこのような症状に陥っていたというケースが報告されています。
実際は正常でも何らかの拍子にコネクターが少しだけ抜けていて問題が起こる事もありえるので、フライト前チェックは行ってください。
Qdj70:F550の組立セットを買った。4セル8インチの指示があったが4セル10インチにしたが何も問題ない。理由は?
A:最近のF550にセットされているプロペラは1038の高回転型の10インチですのでこれによりモーター回転数が高くなり安定しているものと思います
もし通常のスローフライヤー用のものだとパワーと浮力の関係が極端に変わりますので、条件変化により上下しやすくなりますので
ご注意ください。
高回転型の場合は問題がないことがありますが、この点は現物にあわせてご自身でのご判断をお願いいたします。
Qdj71:WKMの起動音がM6だけ遅れる。不良品ではないか
A:音が遅れるだけでは不良ではありません。基本的にはこれ自体はフライトに影響ありません。
パソコンが起動する時に個体差があるのと同じような個体差です。
起動後にWKMで動作調整するので影響がありません。
その他の外観上だけではあくまで推測にすぎませんので、
どうしても不安が残る場合はIOSDのデーターでモーター回転数等確認してみてください。
墜落の心配がないほどの超低空でモーターを回してIOSDの為のデーターをとってください。
これらの情報が、判断に非常に有効です。購入元にご相談ください。
Qdj72:現在NAZA-Hの半自動・半自動着陸は出来る?
A:2013.7.30現在は、まだ開発中でこの機能は利用できません。
GPSモードに入れたまま離陸しても利用できません。今は利用できません(メーカーエンジニア確認済)
開発できましたらDJIダウンロードにアップいたします。
Qdj73:NAZA-MやWKMについてフライト前、GPSに入れた状態で離陸してもよい??
A:可能です。GPSモードに入れた状態で、ホームポジションの緑の点滅がされたら
フライトを開始してください。
できれば最初のテストフライトの時はATTIモードでホバリングを行ってから
GPSモードにいれると、他の設定との問題やGPSアンテナの位置の問題による動きを回避できますのでご留意ください。
また、ATTIモードでは問題がなくてGPSモードに問題があるというような場合の整理がつきやすい理由から
完全なセッティングが出来るまではATTIモードからスタートされる事をおすすめいたします。
Qdj74:WKHでセットアップしてフライトをしてみるとノーマルモードからATTIモードやGPSモードにいれると突然高度が下がった。
ノーマルモードで着陸して地上で動作確認するとこのモードにいれるとスワッシュプレートが動作と同じように下がったなぜ??
A:フェールセーフ設定の時、エンド部分スロットルカーブ100%で設定してください。ここが100%でないとこのようになりやすいです。
しかし、全くならないということではなく、正常でも少しガタンと下がりますので、この点ご留意ください
Qdj75:サーボ付ジンバルで動作がガクガクしている。サーボの問題かジンバルの問題か、NAZA-Mの問題かよくわからない
A:今利用されているサーボはデジタルサーボでしょうか
その場合は、ソフトウェアーのOutputfreqencyを100Hzか200hz程度に変更してください(サーボに合わせて選択してください)。
これだけでもかなりスムーズに動作するようになります。
あとは、動作数値を低くして、実際に動作の渋みを取るようにメンテナンスを行ってください
Qdj76:WKMのIOCで、ホームロックとコースロックを行いました。
しかしコースロックは問題ないが、ホームロックでエレベータースティックを手前に倒すと遠くに行ってしまいます。なぜですか?
A:ホームロックはコースロックと異なり、ホームポジションを固定したところにお尻を向けます。
操縦者や飛ばしたところがホームポジションではありません。
例えば、操縦者から10m先のある地点でホームポジションを設定したとします。ここから手前に操作してもポイント側の方にお尻を向けるので
そちらの方向にお尻を向けて操作されます。
このあたり混乱ないようにご注意ください。
Qdj77:NAZA-MV2(V2ソフトウェアーを利用する製品に共通)で、アドバンスIMUキャリブレーションを行ったが、途中でポップアップで画面が出て終了出来ない。
熱をもっている、5~10分電源を切って待ってから行うように英文指示が出ています。
MCを触っても熱を持っていないし、電源を入れて間もない。故障しているか何か異常があるのではないか
A:これは内部の部品の一部の熱のことでMC側全体が熱をもっているという意味ではないので、指示通り5~10分程度電源を切ってから再度行ってください。
また同じ英文表示されても、それで諦めずにまずは表示されているOKボタンを押します。
また出てももう一度OKボタンを押します。
何度か押した後、OKを押すためのポップアップがでなくなります。
でなくなったら、この部分が通った事になりますので、そのままお待ちいただければキャリブレーションステータスゲージが進みます。
※一度完了した後は続けてまたアドバンスキャリブレーションは行わないでください。
もう一度ポップアップ画面がでてまた実施しなければいけなくなります。
一度終了できたら、ベーシックキャリブレーションを行ってから、IMUチェックで確認してください。
Qdj78:PhantomRTF用の”DJI Phantom No25 ジンバル操作レバー増設用アップグレードセット (DJI純正送信機用)”を電波法認証取得済みRTFと一緒に購入した。動画のように接続等を行ったが、ソフトウェアーの中で、X1が反応しない。不良か?
A:
以下のソフトウェアーをダウンロードして送信機をアップデートしていただくとご利用いただけます
| https://www.dji.com/download/phantom-2-downloads/ こちらのダウンロードページの Phantom RC Assistant Software v1.0 を利用してアップデートしてください 送信機の裏蓋を開けるとUSB接続箇所があります |
送信機のソフトウェアーで
インフォのページを見ていただくと
2.4GHzの部分があります
送信機を接続している時は必ず何らかの数字がここに出ています
例えば1.0.0.2など
Firmware(ファームウェアー)
ここをクリックするだけでアップデートできます
通常のNAZAと同じようにアップデートした後に
電源を切ってからもう一度、TXの動作をソフトウェアーで行い
動作していなければ、キャリブレーションを行ってください
Qdj79:A2のソフトウェアーで上の方に南京錠のマークがでてcontroller was lockedと記載されている何がロックされているか、解除しないと利用できないか
A:それはA2の新しい機能で、モーター等が動かないようにロックされる状態になります。このマークの部分をクリックすると解除されますが、安全の為に設定の際は、そのままご利用ください。完全に設定完了した場合、外してください。
Qdj80:NAZA-MV2で、IMUのアドバンスキャリブレーションが正常に終了できない。ATTIモードで飛ばすとスロットルが言うことを効かないかコントロール出来ずに暴走する。
A:まずはGPSモードとATTIモードを分けてテストする必要がありますが、ATTIモードでこのような暴走が出た場合は、IMUの何らかの問題です。もしソフトウェアーでIMU数字表示の部分にErrorが表示されていた場合。これは販売店にお尋ねください。(弊社では修理可能です)
また、IMUアドバンスキャリブレーションを行う時、機体を水平状態を保って実施していただきますが、このキャリブレーションの時途中で終了してしまった場合
ポップアップ等で、IMUが熱を持っているので5~10分後に行ってくださいというようなメッセージが出ています。
これは電源をいれてまもなく行っていても出る場合がありますので、このメッセージが出た場合は、実際に10分後くらい経過してから、再度行ってください。すると
アドバンスキャリブレーションが成功します。連続で行うとまた表示でますので、一度成功した後は、むやみに何度も行わず、必要な時に行ってください。
この後ベーシックキャリブレーションを行ってからIMUチェックボタンをおして、No needと表示されればOKです
これで問題の動きは修復できています
Qdj81:H3-2Dの動きが不自然で不良ではないか。最初動いていたが動作しなくなった。途中勝手に電源が落ちたように動かなくなった。
A:2013.10.7現在の時点でこれらすべてのお問い合わせの問題は正常な製品に対してのご質問や点検依頼になっていますので急遽ビデオで
解説いたします。
まず簡単な内容からご説明いたします。
・この製品は、カメラを乗せた状態で
重心を計算されていますので、GOPROカメラを載せないと動作させられません。
・フルセットで購入して利用できるはずがフライト中しばらくして動作しなくなったというケースでは
4セル設定でF550のフルセットを利用していたがPhantomのバッテリーを利用したいために3セルを利用したので
単に電力が足りなくなってフライト中動作しなくなったという内容
これは、4セルに戻して解決いたします
・動きが不自然、動かなくなった
この問題はほぼNAZA-MV2側のX1キャリブレーションを行っていない為に発生しています。
すべての接続と設定を行ない、送信機の割り当てたレバー等で
X1が動作するかソフトウェアーで確認します。
次に、NAZA-MV2のソフトウェアーでTXキャリブレーション画面でX1キャリブレーションのボタンを押します。
全域レバーを動かしてから中央に戻して”フィニッシュ”のボタンを押します。
これで完了です
最初にブラシレスアウトランナーのモーター特性として
どの製品でも一定の負荷がかかるとパワーを正確に伝えられずに電源カットされた状態になります。
この負荷に耐えられる力はモーターによって異なります。
マグネットが強い物は指でモーターのカンを回すとコリコリと回るような力を感じます。
これはパワーがあって高トルク型のものに多いです。
指でゆるく回る物は負荷に弱いですが
低回転側でスムーズに動作するものがほとんどです。
H3-2Dなどのブラシレスジンバルは、綺麗な映像を写すため、低回転でもスムーズに動く特性を得るため
負荷に弱いモーターを利用しています。
その為重心を合わせて利用するものが通常で
H3-2Dの場合はアルミパーツで重心が最初から取られていてGo-proの最適な製品となっています。
しかし、一定の負荷があれば上記記載のように電源がカットされたような状態になりフリーの状態になりえます。
また何らかの抵抗となるものがあっても強制的に動作しない特性を最初にご留意ください。
この抵抗はカメラそのものの抵抗であってもです。
ジンバルなのにカメラの抵抗が問題になる場合、設定が正くされていない場合です。
この製品の特性について
FAQをご覧の方への限定公開で以下動画見られます
https://youtu.be/dt0EpuLjs9k
この動画の製品は正常な製品ですが解説の為いくつか説明を交えてご案内いたします
最初自動制御です
次に送信機でレバー操作しています
さらに
1分30秒くらいのところで機体を後ろに極端に傾けてジンバルロックしています
この場合カメラの重量が直にかかってモーターはロックしてしまいます
一旦こうなると電源がカットされたような状態になり動きはフリーで
送信機やジャイロの安定には反応せずに動作しません。
2分30秒くらいのところでわざと負荷を与えています。
これは指でも多少の力を加えてこのようになる特性を示しています。
これらの負荷はフライト中にはありえない負荷です。
しかし設定が正くできていない場合には有り得ます。
X1キャリブレーションをもし正く終了していない場合
最初の状態は個体差がありバラバラですが
一例としてわかりやすく数字で表すと
+100 0 -100となって全域動くのが普通なのが
-10 -10
-10 -20
となっているかもしれません
この場合-10 -10の場合動作しないのは数字で理解していただけるかと思います
-10 -20の場合
一部の範囲で動作しますが-10 や-20以上の送信機側のレバーで動作させるので
急に負荷がかかったようにロックされる可能性も考えられます
これらは調整されていない状態ですので
どのようになるか規則性はなく推測しきれません。
このようにならないためには
容量のあるバッテリーを満充電で利用することと
X1キャリブレーションで確実な設定をすることが必要です
その他、静止状態で確認する際、
姿勢はNAZA-MV2のMC側との相違を計算して補正されます
その為絶対に行ってはいけない方法は、機体NAZA-MV2につけたまま、H3-2Dは手でもって振って確認する
という方法は行わないでください。
確認は機体にしっかり取り付けてNAZA-Mの姿勢とジンバルの姿勢が固定されて一致している状態で確認しないと
動作は不自然になります
ちょうどモーターが空周りしているような音と感覚があり、実際の補正動作しません。
そのまま動作させようとすると、負荷により電源ストップしてしまい、上記負荷で止まる内容と類似したような状況になります
Qdj81:「A2」をWKMのソフトウェアーでアップデートしてしまったらPCで反応しなくなった。A2のソフトウェアーを利用しても反応しない
A:このように行ってしまった場合はA2のMCのF1とF2をループでサーボワイヤーを接続した状態で、PCに接続していただくとアップデートできるようになります。
これによって修正してください
Qdj82:iOSD miniを使用していますが急に距離の表示がでなくなりました。その他の表示はでています。尚、GPSは受信表示しています。
A:マルチコプターとホームポイポイントと同じの垂直線のところだったら、距離が表示しません。
マルチコプターを他の方向を移動させて、距離が出るはずです。
Qdj83:NAZA-MLiteですべて設定してから、操作しようとするとモーターが少し回ってから止まった。ソフトウェアーで確認するとTXキャリブレーションのスライダーがずれている。もう一度行ったが同じ状態になった故障したのか?
A1:最初に動作したところから、送信機自体の設定は正しい事を前提とします。
様々な条件が考えられますが一つの事例としましては、バッテリー接続時のスパークや、機体側の瞬間的な、プラスとマイナスの逆接続等の様々な理由による静電気を大きく帯びている可能性があります。
この場合は、まず一旦電源を抜いて配線したプラスマイナスが正しいか確認し、正しい場合でも5分ほど放置してから再度電源を入れてPCに接続してください。
そのあと、ファームウェアーを更新してからもう一度TXキャリブレーションを行ってください。
これで解決いたします。
上記の流れのどこに問題があるかは様々の為推測しきれない部分はございますが、静電気、ファームウェアー更新時の不十分(偶発)、もしくはファームウェアー更新の時のパラメーター関係のずれ(更新の時は起き得るので必ず確認と再設定を行ってください)
など様々ですが上記の一連の流れを行って頂ければ解決いたします。
A2:もし一度回って止まったということでなくアイドリングからスロットルが動かない等の場合
スロットルのTXキャリブレーションが不完全な可能性があります
例えばTXキャリブレーションの時スロットルスティックも中心中立にしてフィニッシュボタンを押さなければなりませんが
下に下げて最下位にしているかトリムボタンを最下位にしている等です
必ずすべて中間でフィニッシュを押してください
Qdj84:A2の設定正く設定したがどうしても多くのエラーが出たりモーターが回らない等の問題が出ている。不良ではないか
A:いくつかの条件が影響していますので一つずつ確認してください。
・送信機のTXキャリブレーションを終了しているかどうか確認してください
・他の設定がすべて完了しているかどうか確認してください
・今の新しいソフトウェアーとファームウェアーをメーカーサイトで確認し、各更新作業を行ってください
(新しいものに更新できない場合、本当に希ではありますが、メーカーサーバーとの更新上問題があることがありますのでもし日曜日等の場合は月曜日に再度お確かめください)
・設定が完了した後、A2のソフトウェアーで上の方に南京錠のマークのcontroller was lockedをクリックして外してください
このまま利用しているとモーターは動作しません。
・今利用している送信機と受信機が同じメーカーで利用しているかどうか確認してください。
何らかの問題がある場合、Uチャンネルの設定画面でATTIモードにしていてもソフトウェアーのした帯にManualモード等の記載があるなど一致しない状態になっている場合があります。この場合何らかの設定上の問題があります。
・ソフトウェアー上でモーターテストボタン等でテストを行って回っているかを確認してください。
もしまわっていれば、それは設定上の問題の可能性が非常に高い事を示唆しています。
Qdj85:A2をReceiver Connection error としてエラーがでて設定できない。R7008SBを受信機に利用している
A1:
※2014.1.30現在この問題はファームウェアーなどで解決済みです。
新しくファームウェアーを更新してください
現在は有効です万が一類似したものがでた場合は
以下過去の内容をご参照ください
********************************************************
■Qdj85の過去のFAQ
申し訳ございませんがお使いの受信機はA2には対応できません(DJIメーカーエンジニア確認)ので内蔵受信機をご利用ください
※2013.10月末の返答ですが、ファームウェアーで今後解決される可能性がありますのでその都度確認してください。
具体的にはR2008SB・R6208SBは利用できているという情報もございますので合わせてご参照ください
FrskyTFR8SBという受信機も利用できない報告がございますのでご注意ください
A2:弊社でA2のこれらに関する調査を行い各条件等を確認致しました。
まず、D-BUSアダプターで従来のタイプの汎用受信機を接続して確認しました。
通常通り利用できます。
Receiver Connection errorが出た時の対処方法
いくつかの条件がある場合がありますのでご留意ください
※2013.11.25現在のソフトウェアーとファームウェアーについてです
■ケース1(電源入れ直しでTool画面を開かないパターン)■
1:PCのソフトウェアーの画面は、Uチャンネル設定画面にしてください
(※TOOL画面を開かないでください)
2:電源を切ります
・バッテリを外します。
・LEDからUSBを外します。(バッテリーだけ外してもUSBを接続していると一部電源が入ってしまっています)
※必ずUSBを外してください。
3:ソフトウェア確認
・Basic項目ののRCタグを選択して”Uチャンネル設定画面”を開いておきます。
・接続されていない状態だと、この画面のUチャンネル項目の設定がブルーになっていない状態です。
・先ほど出たエラー画面が残っている場合はX等で消しておいてください。
4:電源投入
・USBをPCとA2のLEDに接続(LEDが光ります)
・すぐに本体電源を入れます。
・送信機の電源を入れます
この順番で電源を入れてください。
5:画面確認
エラーが消えている事を確認し、送信機のUチャンネルが動作しているか確認します。
動かない場合は本体(機体)の電源を入れ直します。
※ここでエラーが消えている場合は問題なく設定等が可能です。
この場合でも、ソフトウェアーのTOOLタグを開くとエラーが出ることがあります。
これは受信機とソフトウェアーの認識上のことと思われます。
TOOLで行う必要がある物はエラーがでたままでも行っていただき、終了したら
上記の方法でTOOLを開かずに、エラーを消して設定を行ってください。
■ケース2(USBケーブルの問題■
NAZA等の他のDJI製品を利用している場合でUSBを使い回ししている場合、接触上の問題でエラーが発生する可能性があります。
A2に付属のUSBコネクターを利用してください。
■ケース3(Linkボタン関係)■
※エラーが出ていてもすべての設定を、まずすべて行っていることを前提とします。
エラーが出た場合以下の事を行って解決したという報告があります。
通常は上記ケース1・2で行いそれでも解決しない場合は
以下も試してみてください。
1:電源を切ります
・バッテリを外します。
・LEDからUSBを外します。(バッテリーだけ外してもUSBを接続していると一部電源が入ってしまっています)
2:ソフトウェア準備
・パソコンでA2のソフトウェアーを立ち上げます。
・Basic項目ののRCタグを選択して開いておきます。
・接続されていない状態だと、この画面のUチャンネル項目の設定がブルーになっていない状態です。
3:接続確認1
・D-BUS接続で受信機をA2に接続した状態にしている事を確認します。
・USBをLEDに接続します。
4:接続確認2
・受信機のLINKボタンを先の尖ったものでボタンを押したまま、本体のバッテリを接続して電源を入れます。
・すぐに送信機の電源を入れます。
この状態でMCのLINKの赤いLEDライトが消えている事を確認します。
5:画面確認
エラーが消えている事を確認し、送信機のUチャンネルが動作しているか確認します。
動かない場合は本体のの電源を入れ直します。
電源を入れ直してMCのLINKのLEDライトが点灯していても問題ありません。
まず画面でUチャンネルが動作しているか確認し、エラーが出ていない事を確認してください
これでもエラーが出ている場合は、受信機側、もしくは接続の問題の可能性があります。
今のところ
この手順で消える事を確認しておりますが、受信機によっては異なる結果になる場合はありえるとおもいますので
わからない場合は、販売店にお問い合わせください。
このエラーはA2がPCに接続した時、認識するまでシステムチェック等を行っている為
時間がNAZA等に比べてかかる場合があります
これと同じで受信機からの信号をPC側に認識するまでに時間がかかっている可能性があります。
この時間差の間にエラーが出てしまっている可能性もあるので、
一旦PCのソフトウェアーを閉じて、PMUからLEDを抜いてUSBを抜いて、電源を切るところから接続をし直していくと
消えている可能性があります。
これらの接続をする時にご注意いただく点は電源を抜いてリセットするようにして再度電源投入する場合、
LEDからUSB接続を抜く事が重要です
A2はLEDからも電源が若干流れていて完全に電源が落ちないので
LED側のUSBも抜く事と、バッテリーの電源を抜く事を行ってください
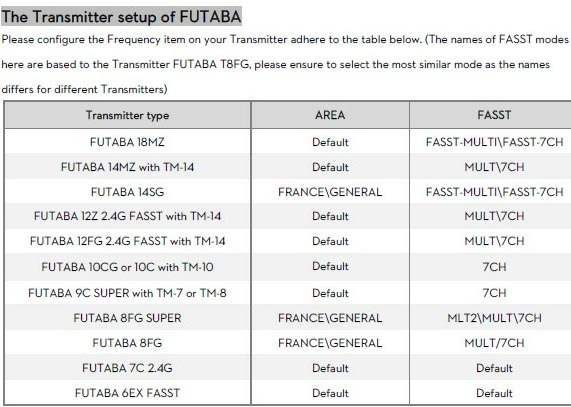
フタバ送信機の場合
以下の表で設定可能な物は行ってバインドしてください
Qdj86:NAZA-Hを購入したがラダーサーボがソフトウェアーでLimitが動作するが、フィードバックで動作しない。終了させて動作もしない不良か?
A:G=ジャイロ感度チャンネルの接続がされていないか設定されていない為です。
TXキャリブレーションを行う画面で、Gのスライダーが動作するか確認してください
ジャイロ感度のスイッチです
接続がされていても動作するように設定されていない可能性があります。
まずはソフトウェアーTXキャリブレーション画面でGチャンネルが動作することを確認してください
できない場合は受信機のGチャンネルに当たる(ほとんどの場合5CH目)に直接サーボを接続して動作することを確認してください
Qdj87:A2で他の外部受信機で正常であったが内蔵受信機が問題で墜落した。これは不良ではないか
A1:2014、1.30現在ほぼ多くの内容を現在のファームウェアーは解決済みです。
ソフトウェアーとファームウェアーを最新のものに更新してください
****************************************************************
Qdj87の過去のFAQ
他の受信機で設定やキャリブレーションを行われたあと、内蔵受信機を利用した時にもう一度キャリブレーション等の設定が必要です
異なる受信機を利用しているので、新しい送受信機を利用する時と同じ状態です。
エラーが出ていなくても、エラーが出ない範囲になっているだけで全部の動作が正しくその組み合わせで動作することは保証できません
必ず、組み合わせを変えたらキャリブレーションを最初から行ってください
また、NAZA-Mから以降された場合、LEDが表示される色の意味は違いがありますのでご注意ください。
特にもし、GPSモードで最初から離陸されている場合、ATTIモードから離陸するように変えて、GPS機能との振り分け判断を行ってください。
NAZAではホームポイント緑に対し、A2では、紫色で、若干ホームポイントの記録方法が違います。GPSはその後に利用されることが望ましく、もしその前から利用した場合、定点ホバリング等もうまく機能しない状態に陥っている場合があります。
この判断を切り分ける為に、始めてフライトされる場合や完全に条件を把握が出来るはまでは、必ずATTIモードで離陸してからGPSモードに変更して確認していただきますようよろしくお願いいたします。
弊社日本語語マニュアルの24ページのフライトテスト等を含め全体的にマニュアルを一度
ご一読くださいますようよろしくお願いいたします。
A2:内蔵受信機等と関係なく、機体そのものに問題があるケースの実例あります。
機体がDJIの純正以外を利用されている場合、機体側の問題も御留意ください。単体モーターがまわるという理由では判断対象になりませんので
別の機体に載せてテストする事も御留意ください
Qdj88:A2を設定してマニュアルモードでモーターを始動した時、モーターが止まらない。ATTIモード、GPSモードでは何もしなければ3秒でモーターは止まる
A:マニュアルモードに関しては、モーターを止める時、スタートと同じコマンドスティックを行って止めます
Qdj89:H3-2Dを調整していますが、どうしてもロール側が左側に傾いて静止します。なにか調整方法がありますか?
A、まず利用されているフライトコントローラーシステム(NAZA等)のファームウェアー更新と
H3-2Dのファームウェアーを更新してください※更新の時は必ず新しいソフトウェアーで更新してください。
ソフトウェアーとファームウェアーは今は一体のことが多いのでソフトウェアーも必ず新しいものにダウンロードし直してください。
次に以下見てください



上図のようにベースが斜めになった状態で電源を入れると傾斜が付いて保持してしまいます
多少の誤差は、取り付けているジンバルマウント側やロングスキッド等の傾き等によって生じている可能性がありますので
ご留意ください
Qdj90:NAZA-MV2でTraditional接続で受信機に接続したところ、Uチャンネル等は動作する。しかし、2本のスティックに反応しないのでキャリブレーションできない。不良か?
A:以下の手順でシステム起動させてください。まず、ファームウェアー更新で動作するか確認してください。
動作しない場合は、S-BUS等のD-BUSシステムを利用して、X2に接続してD-BUSでTXキャリブレーションを行ってください。
この後Traditional接続でそれを選択の上設定していただくと利用できるようになっています。
D-BUS接続品がない場合は、販売店にご相談ください。
Qdj91:Phantom1.3送信機の電源が入らなくなった。4回くらいしか利用していないのに不良ではないか
A:バージョン1.3の送信機をPCでアップデートされた場合失敗しているかもしれません。
まず送信機をPCに接続してアップデートをやり直してください。
実例として失敗しているケースで、LEDが点灯しない状態ということがあります。
この場合は正くアップデートやり直して治ります。また、やり直したあと、赤い色のLEDが点灯せずに、アップデート中と同じ
黄色のLEDが点灯している場合、スティックキャリブレーションがずれすぎている状態です。
送信機ソフトウェアーでキャリブレーションしてください
LEDの意味は以下をご参照ください
通常利用では赤色しか点灯しません
・LED消灯=単に電源が入っていないかファームウェアーのアップデートが失敗している
・LED黄色=PC接続中またはスティックキャリブレーションがズレすぎている
・LED赤色=電波発信状態
Qd92:NAZA-M Liteで機体を完成させてフライトしたが、ATTIモードで横に流れる。不良ではないか。
A:対策としてはございますが、基本的にはNAZA-Mシリーズなどの製品ではATTIモードで横に流れることがあるので、GPSがあります。
また、NAZA-MLiteのファームウェアーはNAZA-MV1の2013年4月時点のものとなっております。
NAZAMV1は現在V2と同じソフトウェアーやファームウェアーを利用出来て、5月からは、システムのウォームアップ機能があります。
これは、余熱などでセンサーが十分な機能を発揮できるようにしてから利用できるようにするものです。
2013年4月より前のLiteのシステムにはこれがありません。
すぐに起動して利用できるのですが、その時にセンサー関係が十分な状態ではない場合もあります。
まずは、ホームポイント記録の時間程度は離陸を待ってから飛ばし、クルージングをある程度してから
周囲の気圧や温度などに慣らすようにしてからが、安定するイメージで利用してみてください
そうすると離陸直線「あれ?」と思うような横流れがあっても、クルージングしてからだとATTIモードでも流れが少なく安定する場合があります。(オートトリムの学習)
一応上記特性をご参照ください
Qdj93:NAZA(H/M-Lite/M-V2等)でIMU状態をチェックしたところ、エラー表示がでている。どうやって治しますか?
A:もしX軸やY軸側にError等表示が出た場合、お客様で修理ができません。このエラーが出た場合はAIRSTAGEでほとんどの場合、修理可能です。まずは販売店にお尋ねください。※ただしエラーを消してもStatus idleから回避できない場合があります。その場合はメーカー修理が必要です
Qdj94:Phantom(Craft)に社外送信機を利用して設定などを行った。しかしGPSキャリブレーションが失敗しやすく安定も非常に悪い。
A:よくあるケースでは、社外ジンバルなどを搭載する時に外へ通じる穴の関係でコンパスを移動してしまうケースがあります。
そうなると、GPSモードに入れても突然前に走り出したり、ニュートラルが取れないような状態になります。
この場合、他の部分をどんなに調整しても改善しませんので、必ず所定の位置にコンパスを取り付けてください。LEDを後ろにしてコンパスは右後ろが
ベストポジションです。位置を変えただけで結果が大きく変わりますのでご注意ください
Qdj95:Z15-GH3(他共通事項)で、初期動作がない。何度か電源を入れ直すとPAN方向に回転して止まらない。アップデートしても高速で回転し制御できない。
A:セットに利用されているG-8コードが接触不良を起こしている可能性があります。まずは販売店にお尋ねください。
Qdj96:H3-2DをNAZAMV2と共に組み立てた。NAZAMやH3-2Dのアップデートも行い最新の状態だが、期待を左右に揺らすと遅れて動作するか逆に動いているようにも見える状態で動きが不自然。動作が揺れについていかない。
A:この確認事例では、NAZAMV2の前方と後方を逆につけていたというケースがあります。まずジンバルを載せずにそのまま飛ばせる状態まで設定できているかどうか確かめるのが近道です。また、NAZAM側の受信機設定ができていない場合で各種設定が出てきない状態でも類似する状態が見られることがあります。それらのすべては正しい状態の設置や設定ではないときに見られているので、その時の症状は必ずしも一定ではありません。
正しく動作しない場合はまず他の箇所が通常通り利用出来る状態かどうかを確かめてみることをおすすめいたします。
Qdj97:H3-2Dジンバルが全く動作しない
A1:ファームウェアー関係のアップデートが失敗しているケースが実例であります。
PCに接続して内容状態を見ると、バージョン0となっている場合があります。
これは何らかの関係でアップデートに失敗しています。USBコードの問題でも起こりえますが具体的にはその状況によるので定かではありません。
この場合は正しくアップデートできることをPCソフトウェアー上でまずは確かめてから再度テストしてみてください。
A2:H3-2Dのアップデートはメインコントローラー・IMU・CMUの3種類のアップデートがあります。
このうちメインコントローラーは出来るがIMUやCMUがアップデートできないという場合は、本体に何らかの障害が出ている可能性がありますので
販売店にお尋ねください
Qdj98:NAZAMで接続設定すべて正しいが離陸する時に急に転倒した。複数確認経験があるので製品問題だと思われる
A:症状としては、姿勢によってモーターが回っていたり回っていないモーターがあって、スロットル中間付近の離陸時に急に全部のモーターが回って、最初に回っていたものとの歩調が合わなくなって転倒しているという状態の場合、これはモーターが離陸に必要な回転を始めるスロットル中間付近で全部回っているのでそれまではアイドリングとなります。このアイドリングの状態に回転の問題がある場合、ソフトウェアーのアイドリング設定がLowポジションになっている場合があります。ここは中間の推奨位置にすることによって利用していただくとモータースタート時のアイドリングですべてのモーターの歩調が合い、通常通り利用できるようになります。
特に複数個ご利用になられているケースの場合は、設定していない状態でも最初から何らかの関係でこの位置にあった場合、確認をされていないか見落とされているケースがあるかもしれませんのでご留意ください。
Qdj99:NAZAHで設定したがモーターが回らない
A1:まずは、ソフトウェアーのToolsでIMUチェックしてください。MC本体を傾けて数値が変わるか確認します。問題なければ、水平な場所において較正ボタンを押し、IMUキャリブレーションを行います。その後IMUチェックボタンを押してNoNeedと記載されるか確認します。
もしここで、数値にエラー表記がある場合は、AIRSTAGEにて修理可能ですのでご相談ください
また、IMUの数値表記がグレーなような状態になっていてIldeのままでも数値の様子を見てください。数値が変化するかどうか時間が経過してRadyになるかどうかを確認します。状況によっては販売店にご相談ください。
A2:ESCによってはスロットルが逆の場合があります。その場合は送信機リバースなどで変化させて実際に合わせてください。
A3:COMMON表記のところでWarning Voltにチェックを入れて再度確認してみてください
Qdj100:IOSDマーク2で自宅付近では距離が表示されるにもかかわらず、なぜか牧草地で行うと距離が表示されない
A:基本的には、ホームポイントが設定されていない、GPSキャリブレーションができていないという理由です。
実際にできているようでもそのまま持って行っている場合は、正しくできていないためにできない状態です
場所によってできないという特殊な理由はありません。
Qdj101j:H3-3Dを購入後早速テストしたが、下を向いて「ジーッ」という音を出し、発熱もひどいように思う。不良ではないか
A:まず、テストする前に、簡易な取り付けテストしている場合は問題がでます。よくあるケースではテストのために簡易な取り付け方法として
セロハンテープや結束バンドなどを付けて稼働させたところ初期起動動作のときに一度下を向いて脱力した後、上を向かないなどです。
これは下を向いたときに、セロテープなどの負荷や重心などの問題などから初期スタンバイの軽い動きができない状態でエラーを起こしています。
発熱は単純にこの時の負荷によるものなので、問題解消しなければ発熱も避けられません。
対処方法は、単純にテスト用の簡易な取り付けではなく、カメラを載せて、カメラの取り付け用の純正ロッキングパーツをネジで止めることが必要です。
それでも動作不自然な場合は、H3-3D側のソフトウェアーをメーカーサイトからダウンロードして、メインコントローラー、IMU。CMUの記載のある箇所をひとつずつアップデートして、その都度電源を入れ直し、次々とアップデートを完了させてください
その上で、NAZAMなどのコントローラー側のX1キャリブレーションを完了させれば正しく動作します。
Qdj102:WKMのソフトウェアー設定の時、ソフトウェアー下の帯のMODEでGPSATTIと表示されるはずだが、ATTIにしか表示されない。
GPSアンテナかMCかPMUが故障したのか?
A:まず今設定等がすべてされている状態の場合、GPSキャリブレーションを行ってください
これを行わないとここの表示は正しく表示されない可能性が高いです
またGPSキャリブレーションが正しく成功することを前提としますが、
終了しましたらGPS系統はほぼ正常と考えられます。
この状態で
キャリブレーションの後正しく表示されるか確認してください
Qdj103:2.4G full HD digital video downlink(Light bridge)でアップデートしたら、携帯端末では問題ないが、HDMI出力ではIOSD情報が出るが映像が出ない、
A:LBは、手元の送信機側のグランドシステムと、映像トランスミッター側のエアーシステムの大きく分けて2つで構成されています。この症状の場合、送信機側のLBだけをアップデートして、機体側に乗せるエアーシステム側をアップデートしていないなどのケースがあります。この場合両方アップデートしてください。次に
コントローラー側(A2やWKMなど)を最新のものにアップデートして確認してください
Qdj104:H3-3Dノーマルを機体に取り付けて、地上で静止状態で正常だが上空に行き、飛ばしていると急に脱力したように揺れが出たり戻ったりする。
通常ホバリングで観察すると問題が起きない
A:このようなケースではほぼ取り付けの問題です。
地上で問題がない場合は基本は問題ありません。
上空で問題が出るのは上昇したり動いたりするとダンパーが動きます。この時、ヨー軸モーターは取り付け部分の上部に突き出ます。取り付け部分に穴が開いていたり補高されていないとモーターが取り付け面に接触した状態で、負荷がかかって脱力します。
ダンパーを完全につぶして突き出るモーターの範囲以上は上部の開口や補高などをおこなって取り付けしなければ問題は発生します
専用アダプターを取り付けるか、この部分留意・想定して取り付けてください
![]()